请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280039C 主题中讨论的其他器件:SysConfig
您好!
我有以下情况、我想实施:
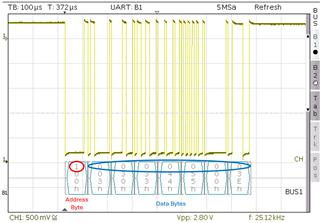
我使用地址位多处理器模式来同步 UART 总线上的消息与多个参与者。 FreeRTOS 在每个参与者上运行、其 UART 通信任务由通过"提供"信标中断传入地址字节来触发。 到目前为止、这也有效。
但是、我有一个问题、那就是我可以不正确地读取后续数据字节或根本不读取。 我没有使用 FIFO、因为根据我的编程经验、它不能与地址位模式组合。 目前我的程序工作如下:
1:通过地址字节(地址位= 1)实现中断
2.使用 sci.h 文件中定义的 SCI_readCharBlockingNonFIFO ()函数读取输入缓冲区的输入地址
3.检查地址是否匹配
4.如果地址匹配、请禁用睡眠模式
5.使用 sci.h 文件中定义的 SCI_readCharBlockingNonFIFO()函数读取以下数据(该函数不能正常工作)
在 查看以下数据字节时、是否有任何相关示例?或者我需要考虑哪些特殊事项?
此致
约书亚