

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800137 尊敬的先生:
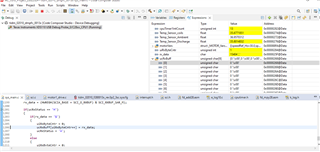
如果我将数据从 Hercules 传输到 MCU、并且我在 UART 中使用了断点 、然后进入并逐步执行(使用 F5/F6)、然后在 ucRxBuff[0]:'$'中实现正确的值。
有关更多详细信息、请查看以下 pic。

如果我去自由运行条件,那么 ucRxBuff[0]缓冲区会显示0x00值。
有关更多详细信息、请查看以下 pic。
有关总体过程、请查看视频以了解更多详细信息。
e2e.ti.com/.../2024_2D00_04_2D00_05-16_2D00_31_2D00_24.mp4
注意: ucRxBuff 缓冲区不用于整个代码中的任何位置 、我只会选中它。
