请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 主题中讨论的其他器件:C2000WARE、 SysConfig
您好、支持团队、
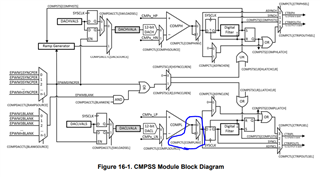
我可以使用 COMPH 或 COMPL 来设置 PWM 有效或无效。 但是、CMPSS 的迟滞对我来说是不够的。
我想知道我是否可以使用 COMPH 和 COMPL 来进行分解并启用 PWM 以实现更大的迟滞范围?
例如:
- ADC < 1V => PWM 引脚始终设置为低电平
- ADC > 2V => PWM 引脚可以工作
感谢您的支持、
阮