

Other Parts Discussed in Thread: POWERSUITE, TIDM-DC-DC-BUCK, TIDM-02000, SFRA
主题中讨论的其他器件:TIDM-DC-DC-BUCK、 TIDM-02000、powerSUITE、 SFRA
您好!
我按照下列文档实施了具有斜率补偿的峰值电流模式控制:
- 数字峰值电流模式控制的分步设计指南:单芯片解决方案(Biricha Digital Power LTD)
- SPRABE7A:具有斜率补偿的数字峰值电流模式控制、使用 TMS320F2803x。
但我有一些疑问。
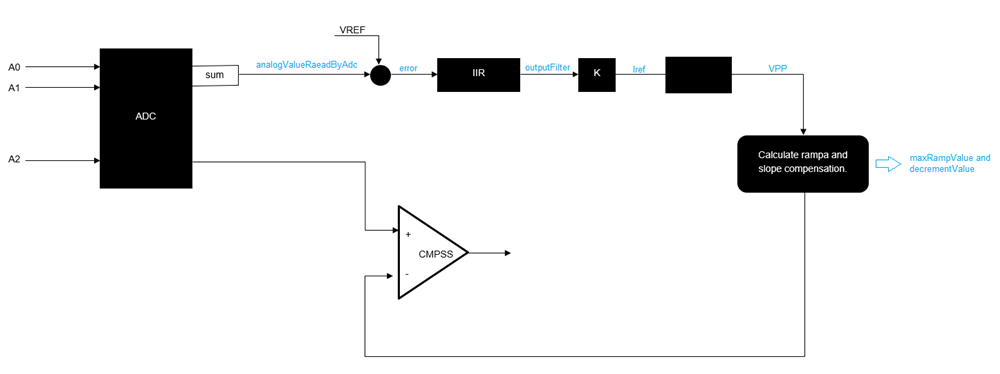
我有一个 ePWM、其中 Fswitching = 100KHz、每100KHz 发生一次 ADC 中断、用于读取模拟输入并执行 maxRampValue 和递减值的计算。 具体而言:
1) 1)我计算误差为: 误差= VREF - analogValueReadByAdc 。 其中、VREF 的计算方式如 Biricha 文档中的公式19所述: ![]() 其中 ADCBits = 12、VDAC = 3、3V。
其中 ADCBits = 12、VDAC = 3、3V。
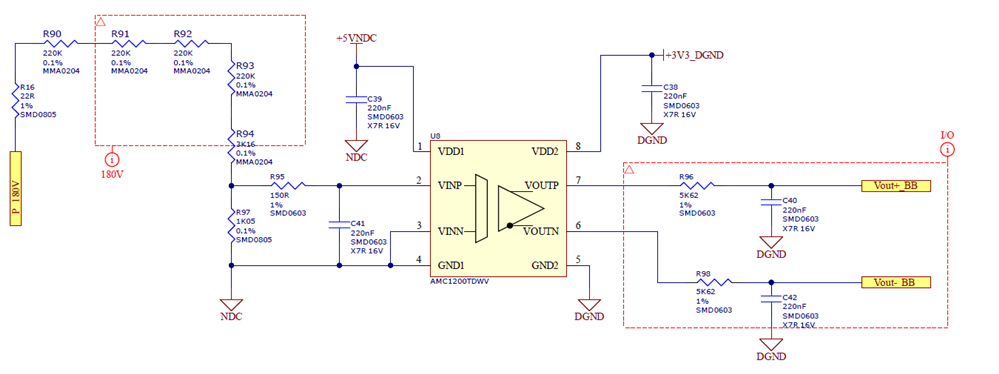
下图显示了我们的反馈信号、其中 Rb = 884k21、R1 = 1k05;差分模式下 IC 的输入到输出增益是 x8。 我们如何在 VREF 计算中插入该值?
2) 2)该 错误 是2p2z 滤波器的输入、它会提供一个称为 OutputFilter。
3)我乘以 输出滤波器 实现 K 根据 SPRABE7A (PAG 3公式(1))中 ![]() 的报告计算,其中
的报告计算,其中
- SamplingGain = 1.71
- ADCmaxV=3.3V
- ADCBits = 12
- DACbits=12
- DACmaxV=3,3V
我呼叫 IREF = K * OutputFilter
4) 4)我计算 SPRABE7A (PAG 7、公式(20) ![]() )中报告的 VPP、其中 D =是 eCAP 读取的 ePWM 的占空比、Ri = 200m Ω、Ts = 10us、Vin = Iref、L0 = 200uH。
)中报告的 VPP、其中 D =是 eCAP 读取的 ePWM 的占空比、Ri = 200m Ω、Ts = 10us、Vin = Iref、L0 = 200uH。
Ri = 200m Ω 是等效于 我们正在使用的电流传感器 CT425-HSN820MR (200mV/A)的转换因子。
5) 5)我使用下面报告的公式计算斜坡配置的 maxRampValue 和递减值:
-
 是 SPRABE71中使用的公式、其中1023是 DAC 位、3.3是 DACmax V。该公式与 Biricha 文档相同 、不含因数64:
是 SPRABE71中使用的公式、其中1023是 DAC 位、3.3是 DACmax V。该公式与 Biricha 文档相同 、不含因数64:  实际上、 在我的计算中、我使用以下公式设置斜坡值: 斜坡= VPP *(4095/3.3)、因为我的 DAC 为12位并且 DAC 范围是3.3V。
实际上、 在我的计算中、我使用以下公式设置斜坡值: 斜坡= VPP *(4095/3.3)、因为我的 DAC 为12位并且 DAC 范围是3.3V。  是 Biricha 文档和我的应用中使用的公式 FS = 100KHz、Fclk = 100MHz。
是 Biricha 文档和我的应用中使用的公式 FS = 100KHz、Fclk = 100MHz。
上述报告的步骤是否正确? 公式是否正确? 我是否需要为峰值电流模式控制执行其他计算?
我附上了我的控制示意图。
是否可以通过某种方法来监控斜坡波形? 如果我不增加伏特值、我该怎么做?
提前感谢您。
此致、
德沃拉
