请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800157 主题中讨论的其他器件:DRV8353
团队成员、您好!
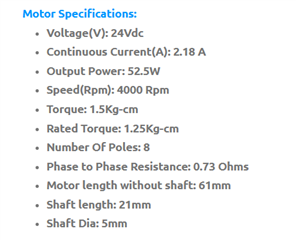
在开发定制电路板的过程中、我们使用 DRV8353和 f2800157 Launchpad 对定制电路板进行了测试、以确保电机在移至定制电路板之前可以正常工作。
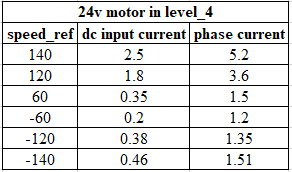
1)使用电机时遇到问题。 当我们设置正 SPEED_ref 值时、电机会在反方向完成一次完全旋转、然后在首次尝试时以指定的速度运行。 必须遵循什么标准才能减少这种在另一个方向的轮换?
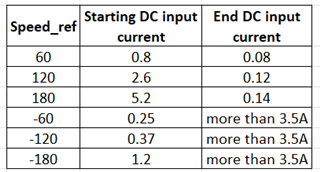
2) 2)我遇到的另一个问题是、当我将 SPEED_ref 值设置为零时、即使它从电源消耗了超过19安培的更大电流、电机也不会启动、并且我在设置负 SPEED_ref 值时也遇到了同样的问题。
3)我们看到了与以前相同的问题,即电机以相反的方式启动和完全旋转。 我已在 UMC 中激活 POT、现在可使用 POT 控制电机转速。
您认为、我们应该为此调整哪些参数?
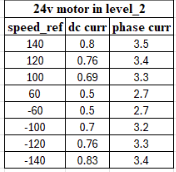
3)是否有任何方法控制电机扭矩、以及更改电机扭矩需要哪些校准参数。
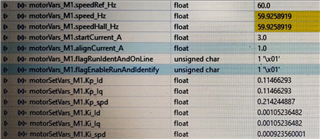
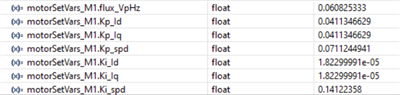
4)如果电机参数更新并使 motor_identicus = true、则无需再次识别、但表达式窗口仍然不显示 user_mtr.h 中更新的值。
每次都需要在表达式窗口中输入电机参数值。 它不是直接在 user_mtr.h 中更新的
提前感谢
此致
Kirana H P