

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379D 工具与软件:
专家们、您好!
我们正在尝试确定 正确的 ID、如果系统在我们的定制逆变器硬件上是稳定的、Iq 波形应该是什么样的。 我们正在运行一个从内置在速度环路中的有传感器双轴驱动器项目获取的固件。
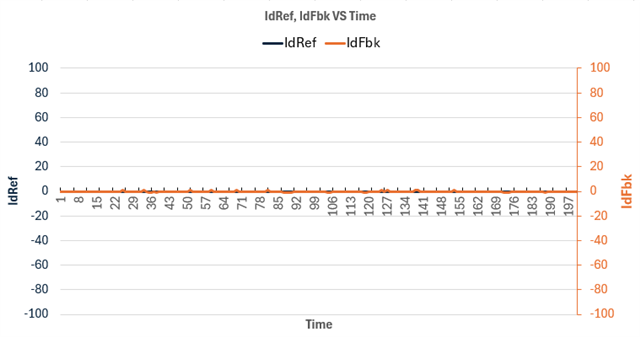
首先,如果系统是稳定的,并且如果 ID 参考(IDREF)设置为零,则根据 Clarke 变换计算出的 ID 反馈 IdFbk 也应该为0 ,允许 Vd 移动,使 ID 反馈变为0。 -->这句话是否正确?
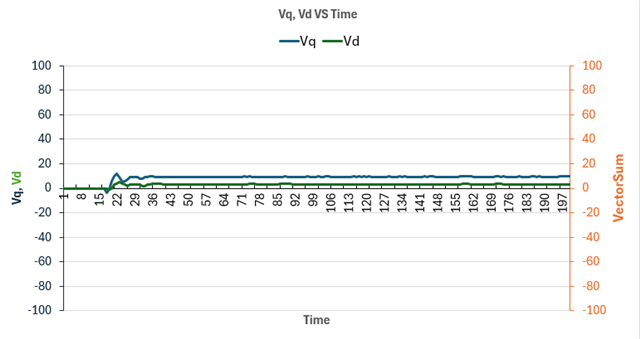
在我们的代码中,我们将 Vq(pi_iq.out )限制为0.91 ,将 Vd 限制为0.3 (pi_id.out )。 Vd 和 Vq 的向量总和小于1。 我们已使用一些循环缓冲区定期捕获一些数据。
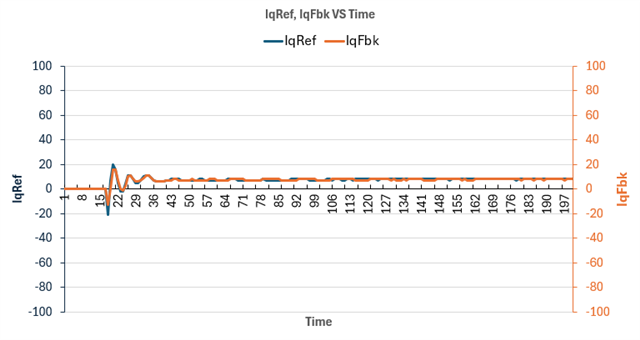
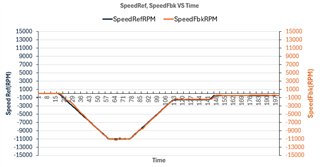
这是我们在电机以1000RPM 无负载运行时得到的波形、请注意、Id、Iq、Vd 和 Vq 的值全部为(pu * 100)
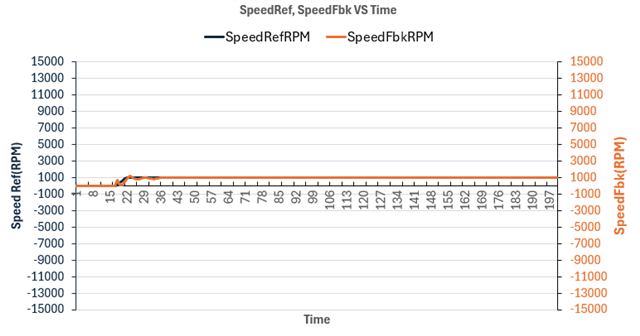
现在、当我们将速度增加到11000 RPM 时、我们注意到 ID 反馈不再接近0、这是正常的吗?
我们还 提供 从 +2 Nm 到-15 Nm 的扭矩。 它从光电扭矩变为再生扭矩。
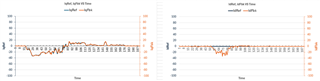
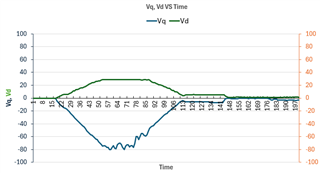
ID 反馈不再是0? 这是否因为不允许 Vd 进一步升高而发生? [>0.30、(图中大于30)]
我们如何确保即使在速度较高时 ID 反馈电流也尽可能接近0。
我们还注意到、随着负载的增加、Id 也会相应地增加!
