主题中讨论的其他器件:MOTORWARE、 DRV8301、DRV8305、 controlSUITE、C2000WARE
工具与软件:
我已举个例子
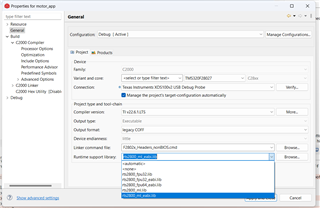
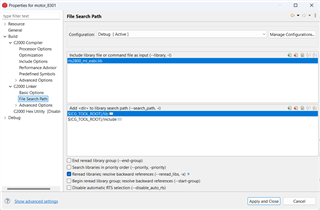
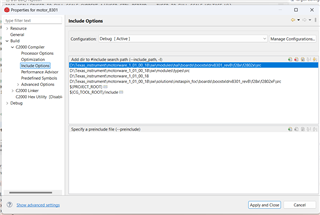
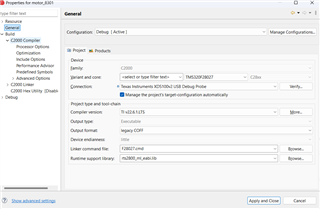
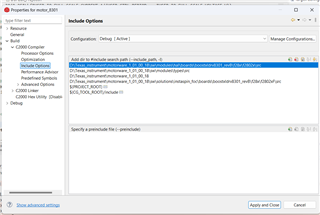
C:\ti\motorware\motorware_1_01_00_18\sw\solutions\instaspin_foc\boards\boostxldrv8301_revB\f28x\f2802xF\projects\ccs\proj_lab5b
TMS320F28027F 与运行 BLDC 电机的 DRV8301不同
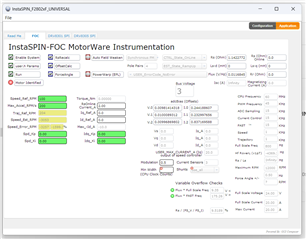
更改了 user.h 文件中的参数:

我已拿起 BLDC 电机。 位于 user.h 中
我是定义人员
#define USER_MOTOR My_Motor
#elif (USER_MOTOR == My_Motor)
#define USER_MOTOR_TYPE Motor_MOTOR Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_RR (null)
#define USER_MOTOR_Rs (0.3918252)
#define USER_MOTOR_LS_d (0.00023495)
#define USER_MOTOR_LS_q (0.00023495)
#define USER_MOTOR_RATED_FLUX (0.03955824)
#define USER_MOTOR_MAGNETIZING_CURRENT (null)
#define USER_MOTOR_RES_EST_CURRENT (3.0)
#define USER_MOTOR_IND_EST_CURRENT (-0.5)
#define USER_MOTOR_MAX_CURRENT (20.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)
以上全部已声明。
我的 BLDC 电机(A2212/13T) 1000KV。
如有任何更改、上述命令将声明计算值。 请告诉我 BLDC 电机(A2212/13T) 1000KV 的计算结果。