请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
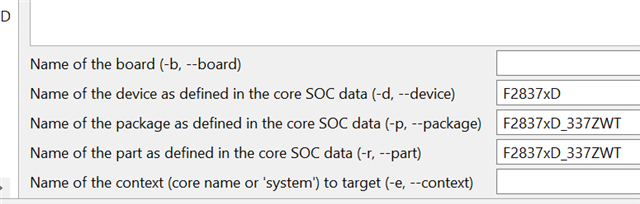
器件型号:LAUNCHXL-F28379D 主题中讨论的其他器件:SysConfig、 C2000WARE
您好!
我要在379D 上使用 I2C 模块。
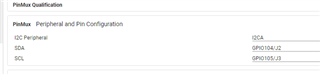
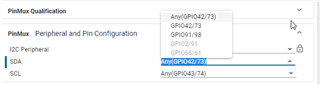
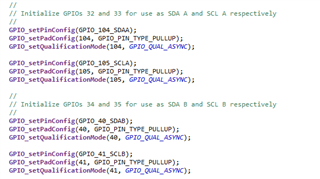
我考虑了 i2c_ex1_loopback 示例、但无法直接下载(在更改软件包并为 SDA 和 SCL 插入适当的引脚时的编译问题)。
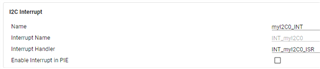
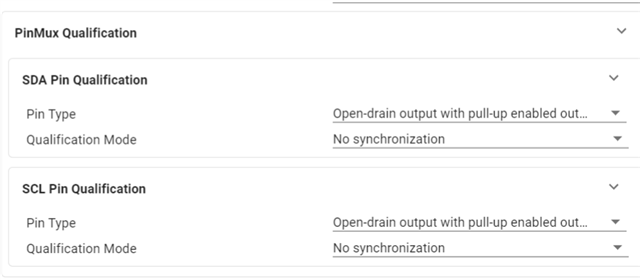
我使用 SysConfig 重新创建了环回
-发射器模式
– 每个数据字节8位
-数据计数= 2 (默认情况下重复模式关闭)
-目标地址= 0x2
-自有地址= 0x01
- Loopbackmode =开
- FIFO 模式
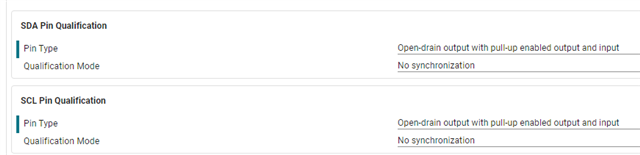
-上拉开漏
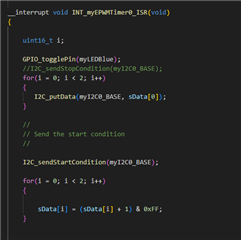
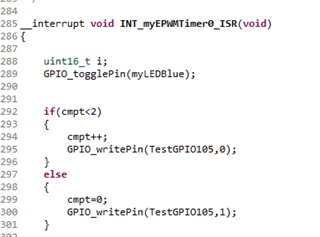
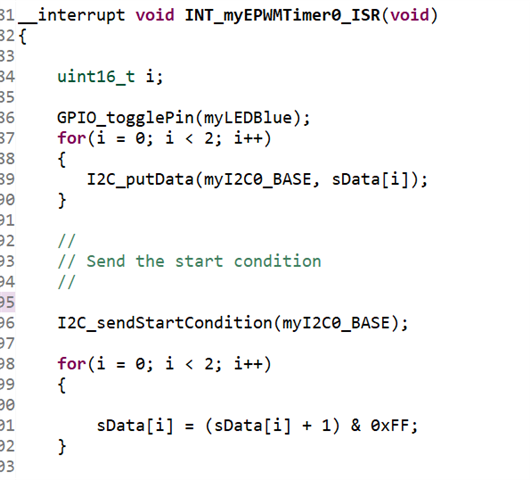
在计时器溢出时、我 在缓冲区中发送 Put 数据、发送启动条件、然后为下一次准备数据
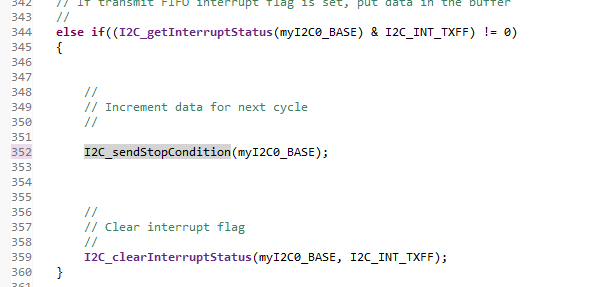
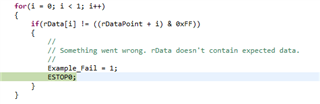
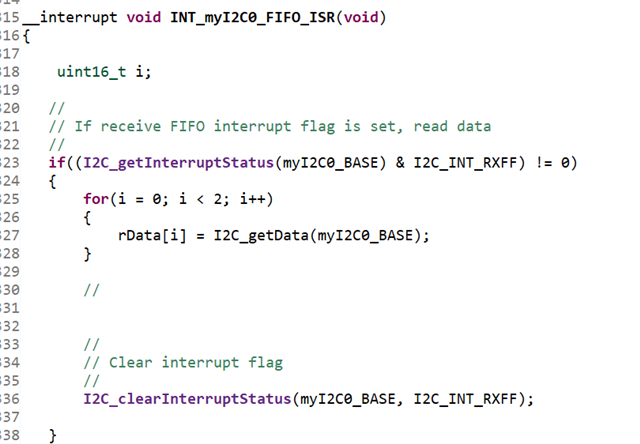
我在 FIFO 中断中读取接收到的数据:
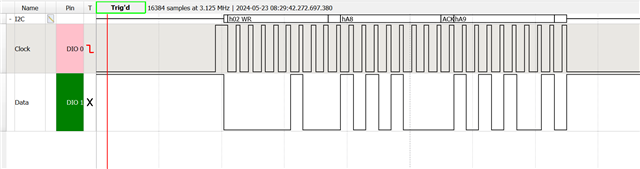
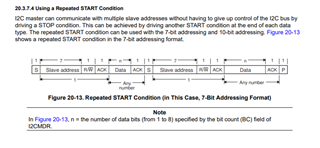
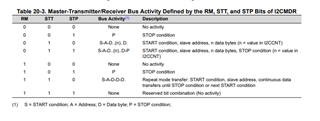
我从不发送停止条件、因为这必须在非重复模式下在发送2个字节后自动生成
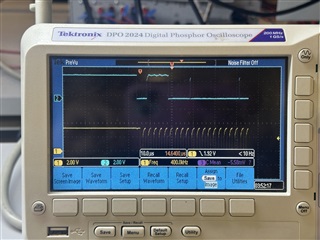
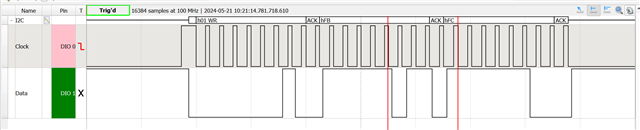
我很惊讶、因为在前两个传输字节之后、SCL 永远不会返回到高电平 (下面的橙色曲线)
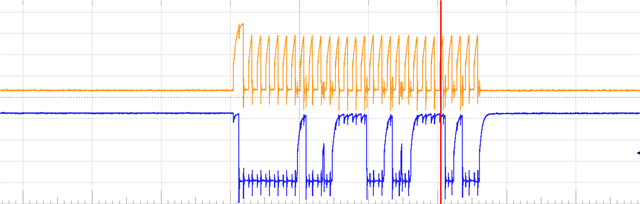
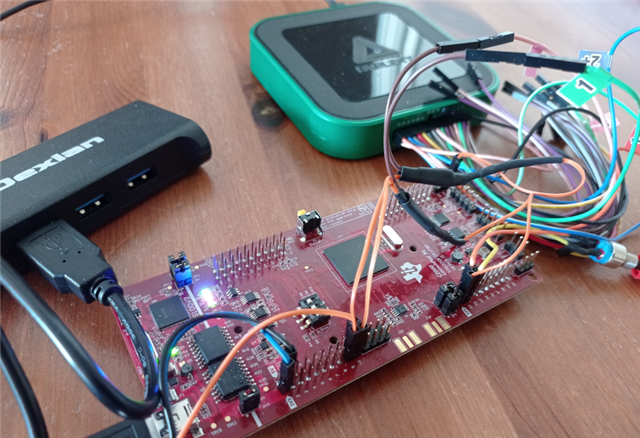
连接数字分析仪时、我实际上从未看到任何停止条件:
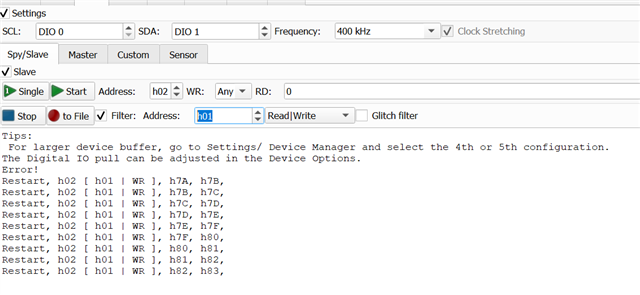
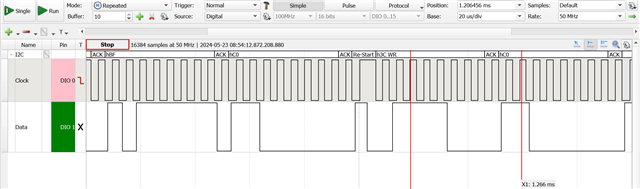
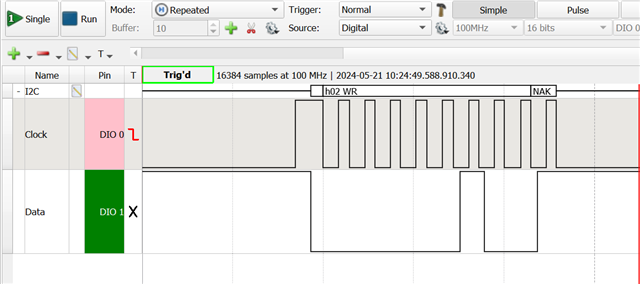
当取消激活环回并请求分析仪作为从器件(0x02)时、此从器件无法确认主器件消息:
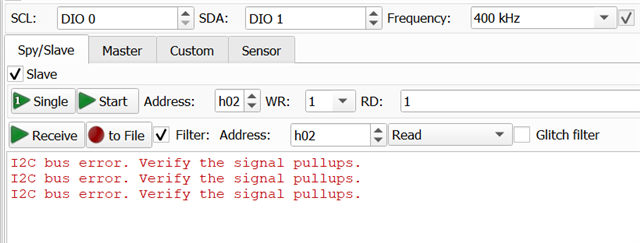
上拉电阻器似乎有问题:
有人能帮我吗?
谢谢你