请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28P650DK 工具与软件:
大家好!
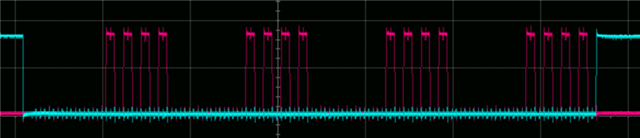
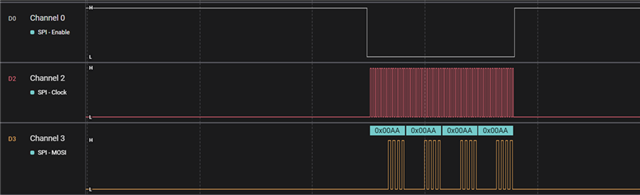
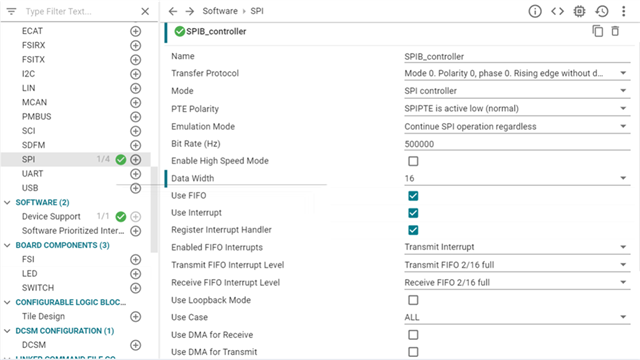
我有一个从设备(MC33772B)、我想通过 SPI 与它进行通信。 这需要一条40位的消息、但不幸的是、我的电路板只能发送16位。
仍然可以通过电路板发送40位吗?或者它不是设计用于此目的吗? 或者我是不是在误会什么东西?
(隔离通信之间有一个 MC33664)
我会非常感谢任何小费。
此致
工具与软件:
大家好!
我有一个从设备(MC33772B)、我想通过 SPI 与它进行通信。 这需要一条40位的消息、但不幸的是、我的电路板只能发送16位。
仍然可以通过电路板发送40位吗?或者它不是设计用于此目的吗? 或者我是不是在误会什么东西?
(隔离通信之间有一个 MC33664)
我会非常感谢任何小费。
此致