请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280039C 主题中讨论的其他器件: BOOSTXL-DRV8323RS
工具与软件:
我 将以下电路板与配合使用 universal_motorcontrol_lab_f28003x 软件...
- LAUNCHXL-F280039C
- BOOSTXL-DRV8323RS
我已经完成了实验1、该实验通过了所有测试。
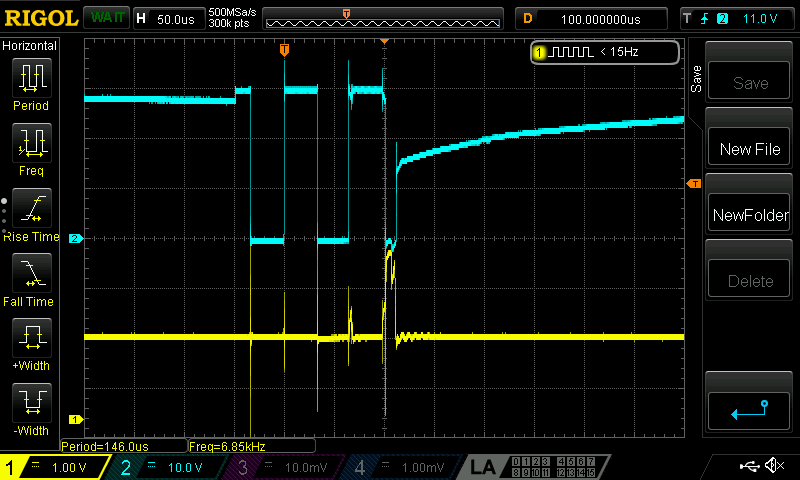
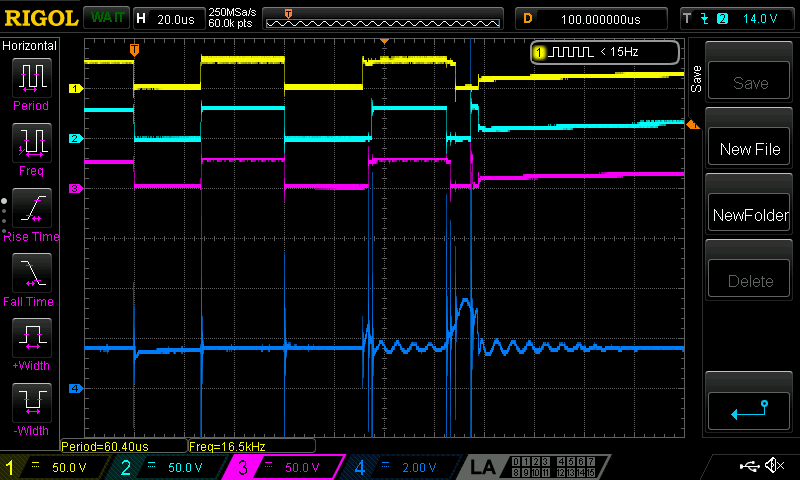
我现在将运行实验2、但是当我设置它时 flagEnableRunAndIdentify 我遇到模块过电流跳闸(motorVars_M1.faultMtrPrev.bit)。 moduleOverCurrent )。
我已按照 《电机控制 SDK 通用工程和实验用户指南》的第3.2.2节(LAUNCHXL-F280039C 设置)和第3.2.10节(BOOSTXL-DRV8323RS 设置)配置了电路板。
我正在使用以下电机
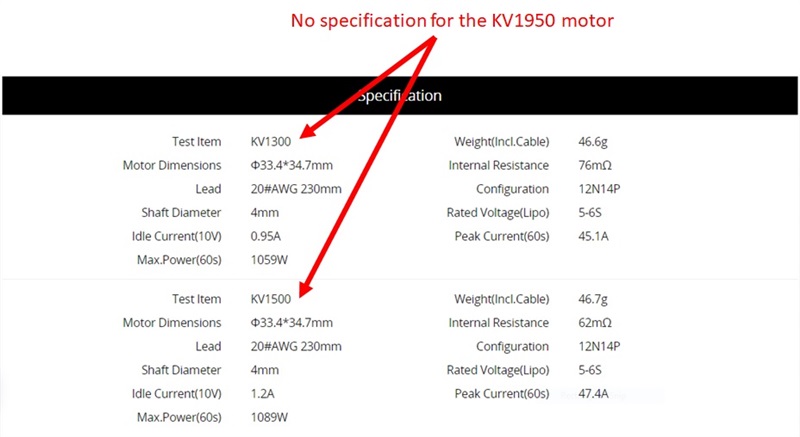
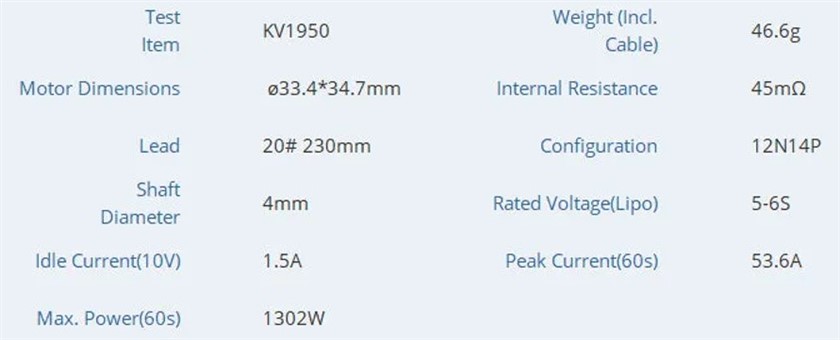
store.tmotor.com/.../f90-fpv-motor.html
遗憾的是、只为该电机指定很少的数据、因此我将使用的定义 无人机_DJI920KV .
我曾尝试更改参数 USER_MOTOR1_VOLT_MAX_V Rs_Ohm 和 USER_MOTOR1_OVER_CURRENT_A、 但仍然出现过流。
如何解决此过流故障、为什么 会发生此故障 ?
#elif (USER_MOTOR1 == Drone_DJI920KV) // Refer to the description of the following parameters for Teknic_M2310PLN04K #define USER_MOTOR1_TYPE MOTOR_TYPE_PM #define USER_MOTOR1_NUM_POLE_PAIRS (7) #define USER_MOTOR1_Rr_Ohm (NULL) #define USER_MOTOR1_Rs_Ohm (0.04f)//(0.115332372f) #define USER_MOTOR1_Ls_d_H (1.76480826e-05f) #define USER_MOTOR1_Ls_q_H (1.76480826e-05f) #define USER_MOTOR1_RATED_FLUX_VpHz (0.00605002558f) #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) #define USER_MOTOR1_RES_EST_CURRENT_A (3.0) #define USER_MOTOR1_IND_EST_CURRENT_A (-2.5) #define USER_MOTOR1_MAX_CURRENT_A (20.0) #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (120.0) #define USER_MOTOR1_NUM_ENC_SLOTS (1000) // N/A #define USER_MOTOR1_INERTIA_Kgm2 (5.06154e-06) #define USER_MOTOR1_FREQ_NEARZEROLIMIT_Hz (5.0f) // Hz #define USER_MOTOR1_RATED_VOLTAGE_V (12.0) #define USER_MOTOR1_FREQ_MIN_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_MAX_Hz (2000.0) // Hz #define USER_MOTOR1_FREQ_LOW_Hz (10.0) // Hz #define USER_MOTOR1_FREQ_HIGH_Hz (1200.0) // Hz #define USER_MOTOR1_VOLT_MIN_V (3.0) // Volt #define USER_MOTOR1_VOLT_MAX_V (30) //(12) // Volt #define USER_MOTOR1_FORCE_DELTA_A (0.05) // A #define USER_MOTOR1_ALIGN_DELTA_A (0.01) // A #define USER_MOTOR1_FLUX_CURRENT_A (0.5) // A #define USER_MOTOR1_ALIGN_CURRENT_A (1.0) // A #define USER_MOTOR1_STARTUP_CURRENT_A (3.0) // #define USER_MOTOR1_TORQUE_CURRENT_A (2.0) // A #define USER_MOTOR1_OVER_CURRENT_A (30) //(16.5) #define USER_MOTOR1_SPEED_START_Hz (20.0f) #define USER_MOTOR1_SPEED_FORCE_Hz (20.0) #define USER_MOTOR1_ACCEL_START_Hzps (10.0f) #define USER_MOTOR1_ACCEL_MAX_Hzps (100.0f) #define USER_MOTOR1_SPEED_FS_Hz (3.0f) // only for encoder, no available on this motor #define USER_MOTOR1_ENC_POS_MAX (USER_MOTOR1_NUM_ENC_SLOTS * 4 - 1) #define USER_MOTOR1_ENC_POS_OFFSET (668) // Only for eSMO #define USER_MOTOR1_KSLIDE_MAX (0.55f) #define USER_MOTOR1_KSLIDE_MIN (0.10f) #define USER_MOTOR1_PLL_KP_MAX (7.25f) #define USER_MOTOR1_PLL_KP_MIN (1.75f) #define USER_MOTOR1_PLL_KP_SF (20.0f) #define USER_MOTOR1_PLL_KI (2.8125E-06f) // Not used, reserve #define USER_MOTOR1_BEMF_THRESHOLD (0.5f) #define USER_MOTOR1_BEMF_KSLF_FC_SF (1.0f) #define USER_MOTOR1_THETA_OFFSET_SF (1.0f) #define USER_MOTOR1_SPEED_LPF_FC_Hz (200.0f) // for IS-BLDC #define USER_MOTOR1_RAMP_START_Hz (5.0f) #define USER_MOTOR1_RAMP_END_Hz (30.0f) #define USER_MOTOR1_RAMP_DELAY (1) #define USER_MOTOR1_ISBLDC_INT_MAX (0.015f) #define USER_MOTOR1_ISBLDC_INT_MIN (0.010f) // for Rs online calibration #define USER_MOTOR1_RSONLINE_WAIT_TIME (60000U) // 5min/300s at 5ms base #define USER_MOTOR1_RSONLINE_WORK_TIME (24000U) //2min/120s at 5ms base // Current and Speed PI Regulators Tuning Coefficient #define USER_MOTOR1_GAIN_SPEED_LOW_Hz (60.0f) #define USER_MOTOR1_GAIN_SPEED_HIGH_Hz (150.0f) #define USER_MOTOR1_KP_SPD_START_SF (1.5f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_LOW_SF (2.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_SPD_HIGH_SF (1.0f) // 0.1~100.0 #define USER_MOTOR1_KI_SPD_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_GAIN_IQ_LOW_A (2.0f) #define USER_MOTOR1_GAIN_IQ_HIGH_A (6.0f) #define USER_MOTOR1_KP_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_START_SF (1.5f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_LOW_SF (2.0f) // 0.1~10.0 #define USER_MOTOR1_KP_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_IQ_HIGH_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KP_ID_SF (1.0f) // 0.1~10.0 #define USER_MOTOR1_KI_ID_SF (1.0f) // 0.1~10.0