请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28379D 工具与软件:
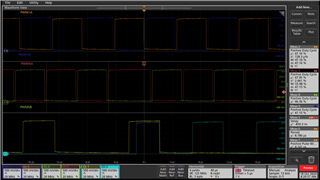
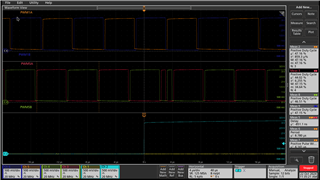
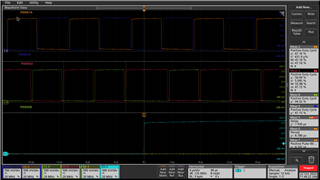
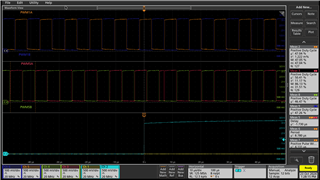
在双有源电桥控制应用中、当相移计数器值从超前突然变为滞后(从0.5-1变为0-0.5或相反)时、转换器对脉冲跳跃事件非常敏感。 我希望采用一种权变措施来 减轻这种影响。
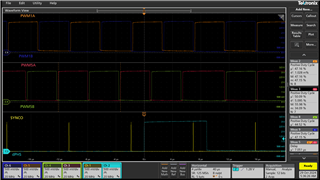
当跟随者 PWM 通道上发生同步事件时、我想要:
检查相位值是否介于0和0.25*TBPRD -->设置 OUTA 并清除 OUTB
或者 检查相位值是否介于0.75*TBPRD 和1*TBPRD -->清除 OUTA 并设置 OUTB 之间
通过读取/写入寄存器是否实际上可以实现上述功能?