请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDM-DC-DC-BUCK 主题中讨论的其他器件:BOOSTXL-BUCKCONV、 SysConfig
工具与软件:
你(们)好
我将学习如何对 C2000进行编程以控制评估板 BOOSTXL-BUCKCONV。 我当时学习的是 BUCK-F28004x 的代码、发现有一个 器件很难理解。 在函数中
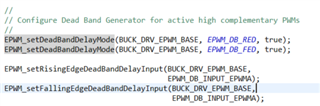
BUCK_HAL_setupSyncBuckPwm ();
有一个函数将被调用
EPWM_setCounterCompareShadowLoadMode (BUCK_DRV_EPWM_BASE、
epwm_counter_compare_A、
EPWM_COMP_LOAD_ON_CNTR_PERIOD);
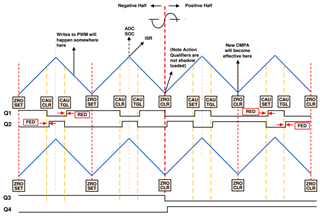
我理解它的作用,但我的问题是:我如何决定是否使用 LOADAMODE = 0、1或2 ? 我的理解是 COMPA 寄存器会在占空比开始时或之后更新 TBCTR = TBPRD 、在下一周期中将更新计数器。
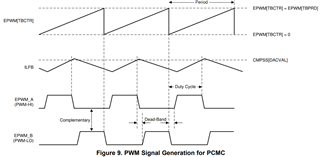
的说明 电压模式控制 、代码使用 0x01 . 为什么不呢 0x00 例如? 绝对最大值 峰值电流模式控制 、我是否应该使用 0x00 因为计数器需要立即更新?