请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28386D 工具与软件:
您好!
我将尝试从数据表中执行以下示例:

我完成了所有配置的不同之处在于我做了:
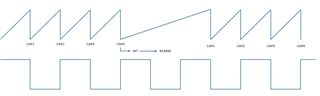
下降沿上的 CAP1
上升沿上的 CAP2
下降沿上的 CAP3
上升沿上的 CAP4
此外、我将中断设置为仅在 CAP4就绪时才触发。
然后在中断中、CAP2、CAP3、CAP4的值与预期一致、但 CAP1在第一个中断中的值并不完全相同、它离开了1000个计数、并且对于每个中断、它都在预期值附近保持去抖、所有其他 CAPS 始终是正确的。
下面是我所做配置的 sudo 代码:
1 -禁用 SYNC (也冻结到 PWM 的时钟)
2-清除 AQ 子模块先前的配置
配置 ePWM 模块
3.1-设置 clk 预分频器
3.2 -设置时基周期
3.3设置时基计数模式
3.4-设置相移
3.5- SetActionQualifierAction
4 -启用 SYNC 和时钟到 PWM
设置中断功能
6 - 禁用并清除所有的捕捉标志和中断
禁用 CAP1-CAP4寄存器加载和停止计数器
8- 在事件4时启用捕捉模式并停止捕捉
9 -将事件的极性设置为下降(CAP1)、上升(CAP2)、下降(CAP3)、上升(CAP4)边沿
10 - 为所有电容器将捕捉设置为时间差模式
11- 启用模块
11.1-启用加载计数器
11.2- setSyncOutMode
11.3- startCounter
11.4- EnableTimeStampCapture
11.5-启用 CAP4的中断
11.6 -启用模块中断
11.7-启用全局中断
12-请重新布设
等待中断并检查捕捉的值
14 -执行步骤13多路复用时间
每个中断的所有值都是正确的、CAP1除外。
有什么建议或原因吗?
注意:我使用的是单次触发模式、在中断内部、我在最后做的是:
1-清除中断
2-清除全局中断
重新布设
4- ClearAckGroup4.