

Other Parts Discussed in Thread: MOTORWARE, LAUNCHXL-F280025C
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:MOTORWARE、 LAUNCHXL-F280025C工具与软件:
您好!
为了在不同条件下为我的电动自行车应用获得最佳的起始性能,需要使用霍尔传感器反馈。
无传感器快速算法 在某些条件下(例如车辆处于斜坡上、负载更大等)不会启动
使用 FAST 算法可以获得非常好的正弦电流波形。 但使用霍尔反馈时、电流波形太糟糕。 电流波形有阶跃。 这会导致 电机发出大量可闻噪声、对于应用而言是不正常的。
请建议如何 使用霍尔传感器反馈获得正弦电流。
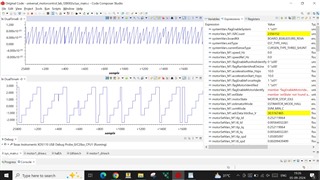
下面是 使用 A 相上的电流探头捕获的示波器电流波形
黄色信号是霍尔 A、 蓝色是 A 相电流。
速度基准频率为20Hz。

(无传感器)快速算法、霍尔 A、A 相电流、速度基准 20Hz

(传感) HALL+ FAST 算法、霍尔 A、相位 A 电流、速度基准 30Hz

(传感) HALL+ FAST 算法,霍尔 A,相位 A 电流,速度基准 100Hz
我相信这种类型的电流 形状不适合 大多数有霍尔传感器的应用、TI 会做一些工作来通过霍尔传感器获得正弦电流。
所有可用于 电动自行车应用的控制器,提供正弦,可闻无噪声电流。
谢谢、此致、
Anil





 霍尔 A 与 A 相电流 及负载-原始代码
霍尔 A 与 A 相电流 及负载-原始代码  启动期间霍尔 A 与 A 相电流间的关系 1 -原始代码
启动期间霍尔 A 与 A 相电流间的关系 1 -原始代码  启动期间霍尔 A 与 A 相电流间 的关系2 -放大后-原始代码
启动期间霍尔 A 与 A 相电流间 的关系2 -放大后-原始代码  霍尔 A 与 A 相电流始终以20Hz 的频率运行 -修改后的代码
霍尔 A 与 A 相电流始终以20Hz 的频率运行 -修改后的代码  霍尔 A 与 A 相电流始终以20Hz 的频率运行 、起始 编号为1 -修改后的代码
霍尔 A 与 A 相电流始终以20Hz 的频率运行 、起始 编号为1 -修改后的代码  霍尔 A 与相位 A 电流的运行频率始终为20Hz (起始频率为2)、放大 后的代码-修改后的代码
霍尔 A 与相位 A 电流的运行频率始终为20Hz (起始频率为2)、放大 后的代码-修改后的代码  霍尔 A 与 A 相电流>>1)霍尔 2)快速 3) 市场上的控制器、可提供良好的霍尔性能
霍尔 A 与 A 相电流>>1)霍尔 2)快速 3) 市场上的控制器、可提供良好的霍尔性能  市场上的控制器-启动-霍尔 A 与 A 相电流
市场上的控制器-启动-霍尔 A 与 A 相电流 
 hallSineAngle wert hall
hallSineAngle wert hall  angleFOC_rad wrt hall
angleFOC_rad wrt hall  Hall_Hz 露天音乐厅
Hall_Hz 露天音乐厅  霍尔 A 与电流 A 之间的关系、具有-1.57常数
霍尔 A 与电流 A 之间的关系、具有-1.57常数  启动期间节气门电压与 A 相电流间的关系
启动期间节气门电压与 A 相电流间的关系  电流突然的边沿
电流突然的边沿  Hall_Sine 起始 霍尔 A 与 A 相电流间的关系
Hall_Sine 起始 霍尔 A 与 A 相电流间的关系  使用 Hall_Sine 和市场控制器启动霍尔与相电流之间的关系
使用 Hall_Sine 和市场控制器启动霍尔与相电流之间的关系 