主题中讨论的其他器件:MOTORWARE、 BOOSTXL-DRV8320RS、DRV8320 、 LAUNCHXL-F280049C、 DRV8323
工具与软件:
您好!
我们愿就这一问题采取后续行动、因为似乎我们所面临的问题与这一主题中所报告的问题完全相同、而且整个论坛都找不到充分的答案。
最近、我们在电机控制器板上从 F28069M (使用 MotorWare)过渡到第三代处理器 F280041C (使用 MCSDK 5.0.0.3)、适用于采用低电感电机的高功率应用。 在使用 MotorWare 的上一版本中、我们成功地在高达3kW 的功率下运行电机、而不会出现任何问题。 现在、我们正在努力用 RPM 提高速度、而不是9000左右的速度。 为避免速度控制器产生影响、我们还尝试了使用 Iq 设定点的扭矩控制模式。 我们还验证了识别过程的输出参数与旧版本几乎相同。
系统参数:
PWM 频率 :20kHz
ISR 频率:20kHz
电流控制频率 :20kHz
速度控制频率 :2千赫
电压滤波器极频率:654Hz
电压 ADC 标度:39.685
当前 ADC 比例:825
最大 VS MAG:0.5
识别的电机参数:
USER_MOTOR_EVM Rs_Ohm 0.0110599976
USER_MOTOR_LS_d_H 3.74998126e-06
USER_MOTOR_LS_q_H 3.74998126e-06
USER_MOTOR_RATED_FLUX_VpHz 0.00662664603
USER_POLE_PAIRS 7.
我们的观察:
1、使用 Iq 设定值高于170A 的扭矩控制模式时,估计转速与使用外部光学传感器的实际测量转速不同。 将设定值设置为较高不会进一步增加转速。

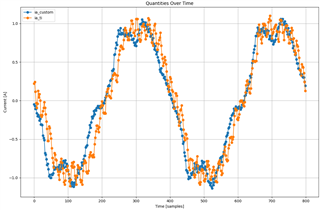
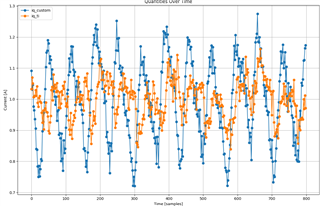
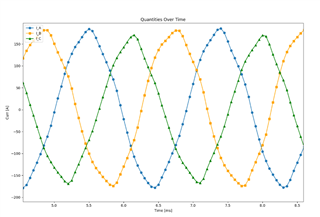
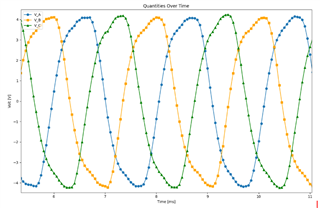
2.在所有三个相位上采样的电流和电压看起来在170A IQ 设定点附近正常。 但是、如果将设定值设置得更高、达到某些点会导致混乱、并且在电流和角度估算中会出现失真。 当我们尝试在速度控制模式下提高 RPM 时也是如此。

IQ 电流的振荡似乎比预期的要多(在扭矩控制模式下捕获、Iq 阶跃为5至10A)。
当然、我们也尝试过调整电流调节器的 PI 参数、但是这对振荡没有太大影响。

4.代码中有3个新参数、这些参数对系统有很大影响、但是没有适当的定义。 如果您能了解这些参数在估计器中的实际作用以及如何对其进行调整、我们将不胜感激。
USER_EST_FLUX_HF_SF -将此值增大至默认值0.125以上、会将可实现的最大 RPM 设置为更低。 将其设置为值1、我们无法达到~7000 RPM 以上。
USER_EST_FREQ_HF_SF -似乎无效
USER_EST_BEMF_HF_SF -对 RPM 估算有显著影响。
看起来从某些原因来看、在高功率/RPM 范围内、MotorControl SDK 的工作方式与 MotorWare 不同、我们需要了解原因。 我们决定使用这款新一代处理器、以期实现更高的性能、释放新的可能性并避免旧组件过时。 然而、到目前为止、这导致了这些问题以及在按时向客户交付器件的过程中出现延迟。 我们非常感谢您的帮助。