工具与软件:
您好!
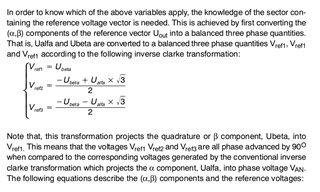
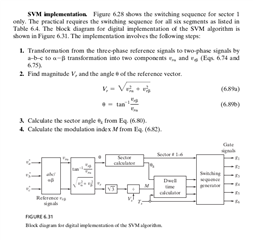
我正在与 PM_Sensorless 项目一起工作、开发 DRV8312和 TMS320F28069M 控制卡。 我遇到了 SVGEN_DQ 模块、我无法把握住应用于标准逆向 Clarke 变换的90度相移的需求、以及扇区确定算法。
我们有修改后的反向克拉克变换、
/* Inverse clarke transformation */ \ Va = v.Ubeta; \ Vb = -temp_sv1 + temp_sv2; \ Vc = -temp_sv1 - temp_sv2; \
根据扇区确定代码:
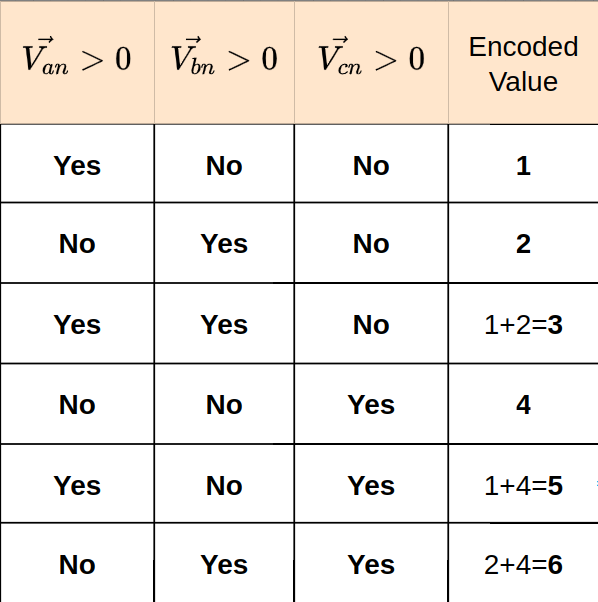
/* 60 degree Sector determination */ \ if (Va>_IQ(0)) Sector = 1; \ if (Vb>_IQ(0)) Sector = Sector+2; \ if (Vc>_IQ(0)) Sector = Sector+4;
我创建了此表(扇区初始化为0):
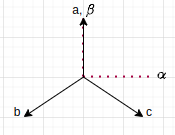
VA 为正的区域用与 A 相向量对齐的半圆表示。 我尝试将区域可视化为这样的区域:
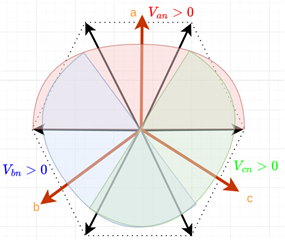
当 Va>0时、根据表格、扇区应该为1、但实际上它在第二扇区中、
当 va>0和 vb>0时、它应该是扇区3、就是这样。
是的、我感到困惑。
感谢您的支持!
此致