请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:LMK0.4828万 主题中讨论的其他部件: LMK0.4832万, LMK1D1204
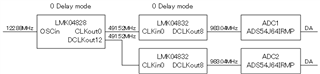
比较LMK0.4828万+ LMK0.4832万+ ADC (ADS54J64IRMP)采集的数据。
即使SPI是在打开和关闭电源后设置的(每次参数都是一致的,并且两个器件之间的参数是一致的),ADC2与ADC1的相位基本上是相同的相位差异。 ,有一些波动。
我想知道这种轻微波动是否在容许范围内,但我应该如何考虑呢? (抖动?,歪斜?)