

Other Parts Discussed in Thread: LMX2594, REG101
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LMX2594 主题中讨论的其他器件: REG101
大家好、
我们的一位客户 有以下问题。 您能不能提供解决问题的想法?
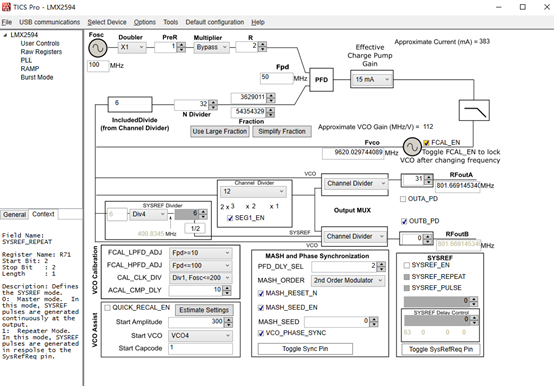
器件1和器件2的基准信号来自同一个时钟。 SYNC 连接在一起。 通过程序控制将同一程序写入器件1和2。 SYNC 由脉冲信号从外部控制、输出未锁定。 添加脉冲后、频率输出不相干。 将寄存器58中的位15设置为0。 当外部 SYNC 生成脉冲时、电流将增大、但它仍然未锁定。
此致、
罗美
