请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TM4C123GH6PM 工具/软件:Code Composer Studio
你(们)好
我是TI MCU/CSS的新手(也是MCU的新手)。
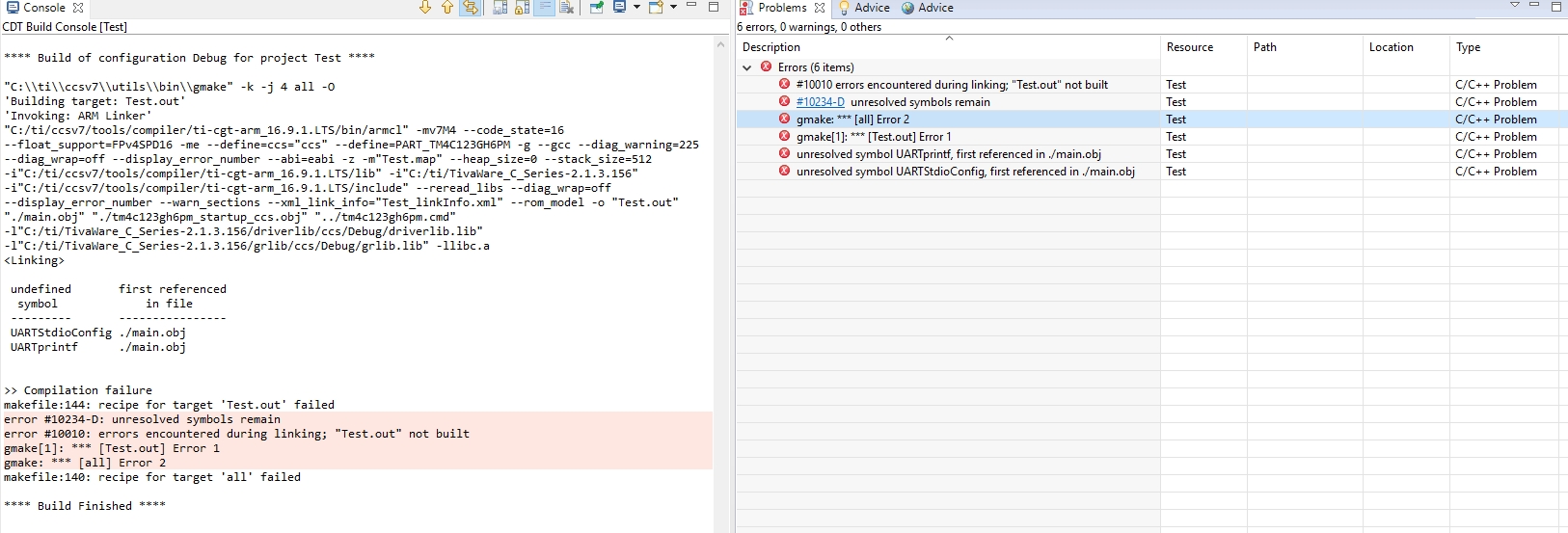
我尝试为MCU构建一个旧项目,但由于include文件和DriverLib不可访问而出现错误,我尝试包含的文件包括:
我正在尝试修改所附项目的从属部分,我所做的更改不包括在内,这是GitHub的项目副本,我假定上载项目时项目正常。
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "inc/HW_CAN.h"
#include "inc/hw_ints.h"
#include "driverlib/can.h"
#include "driverlib/interrupT.h"
#include "driverlib/sysctl.h"
#include "driverlib/gPI.h"
#include "driverlib/UART.h"
#include "driverlib/pin_map.h"
#include "utils/uartstdio.h"
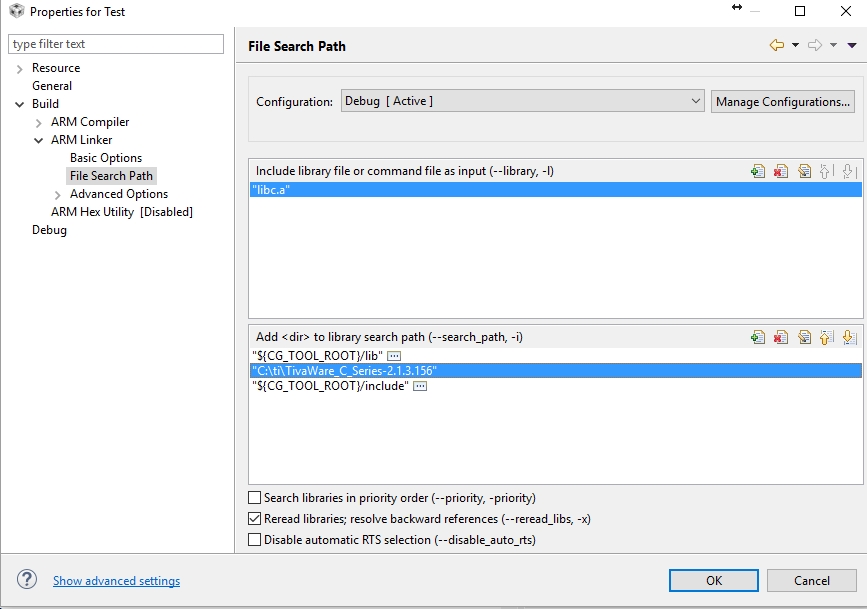
似乎无法获得memmap.h和以下文件,我认为所有这些文件都可以通过下载一些“软件包”到CCS添加到工具中,这是正确的吗?
如何获得它?
请记住,我是新手,所以请与我一起解释"为傻子"。
感谢您的帮助,Petere2e.ti.com/.../tiva_2D00_can_2D00_bus_2D00_master.zip