请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DAC102S085 您好,
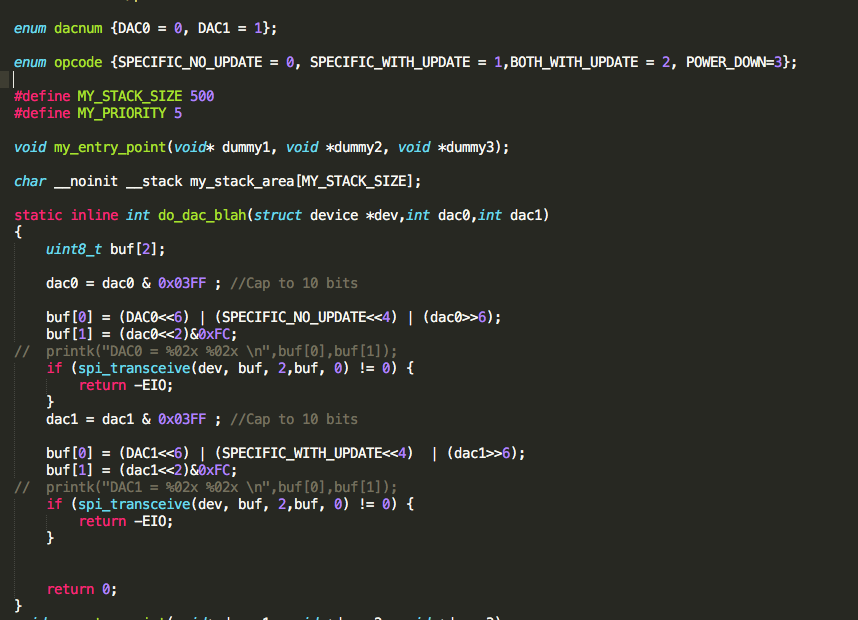
我们的设计中存在您的其中一个DAC的问题。 下面是具体的操作方法:
设计:
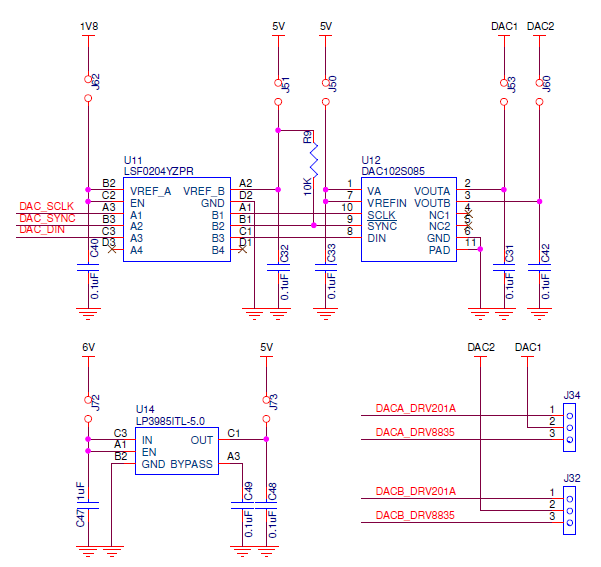
- C48 -更改为1uF。
- C31,C42 -更改为1500pF
问题:
- J72,J73,J62,J51,J50 -分流器开启
- J53,J60,J34,J32 -分流跳线关闭
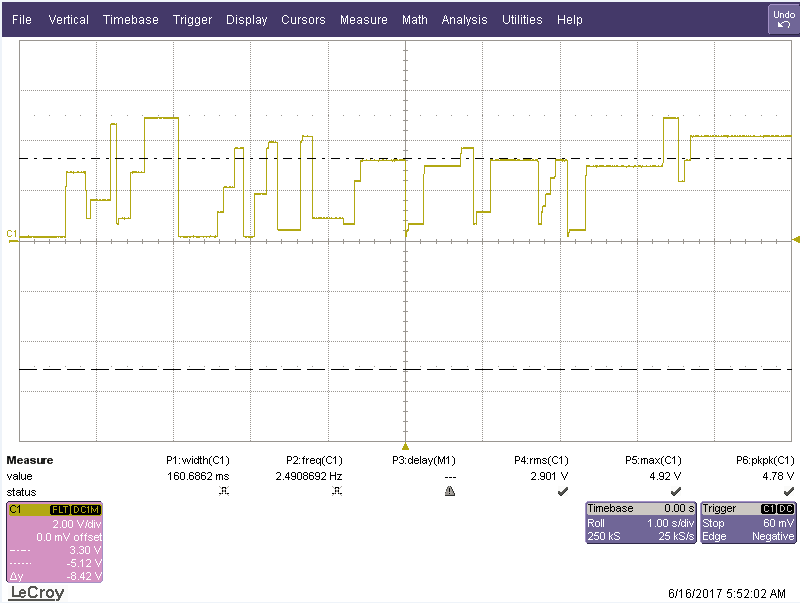
- 在这种情况下,此特定主板中J73处的输出为5.010V。 我们在芯片侧的J53和J60上看到以下内容:

- 但是,如果我们卸下跳线J73并在5V侧提供4.950 - 5.005V之间的电压,我们会看到以下情况:

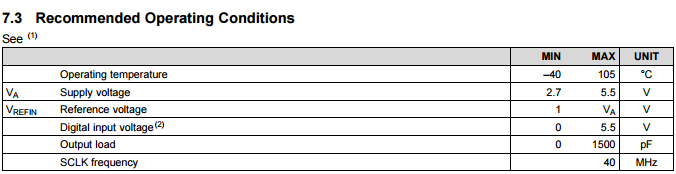
- DAC I/P电压范围(根据数据表):
我们想知道这里出现了什么问题。