请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:PGA411-Q1 您好~
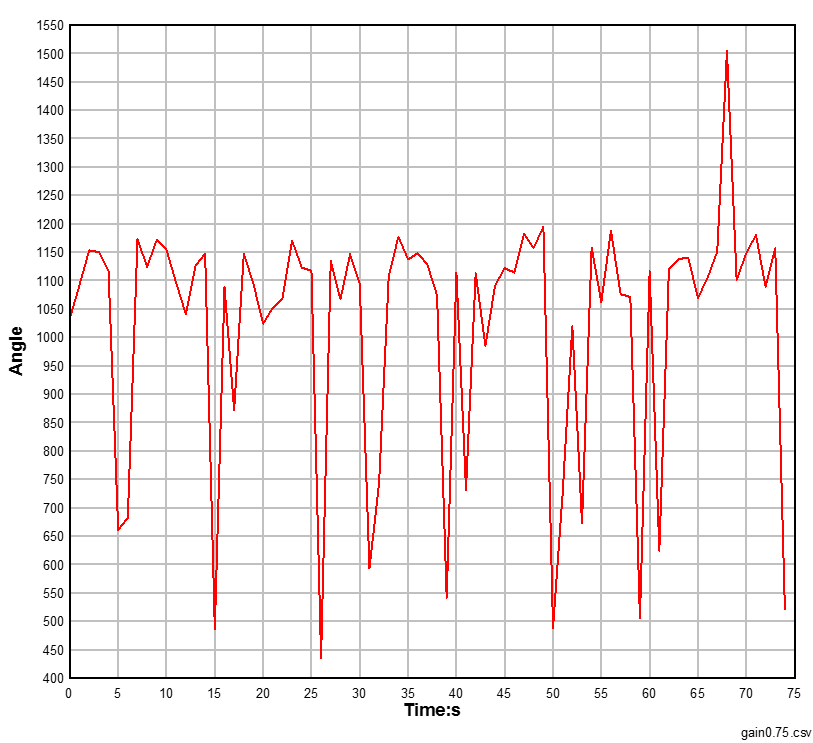
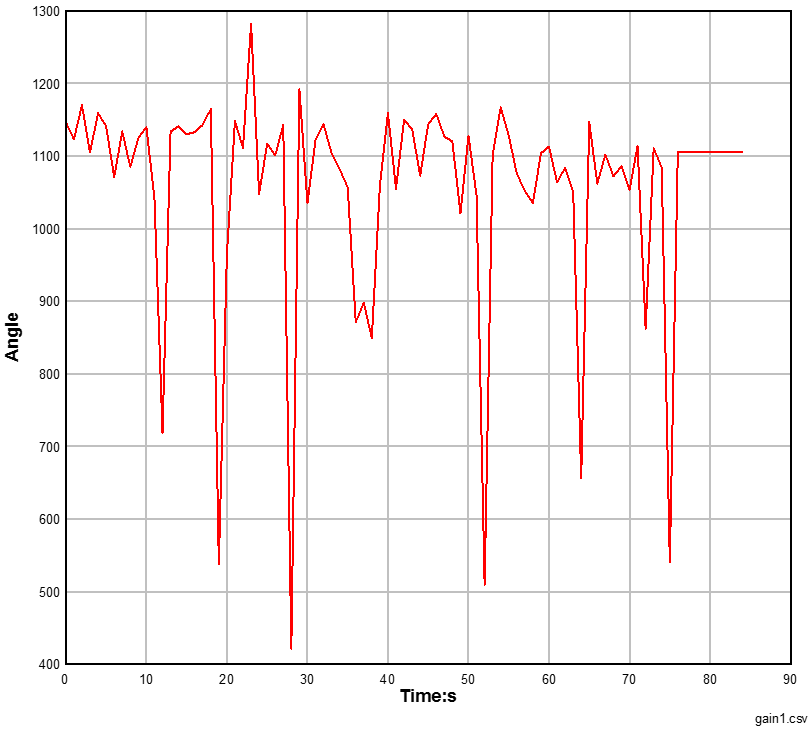
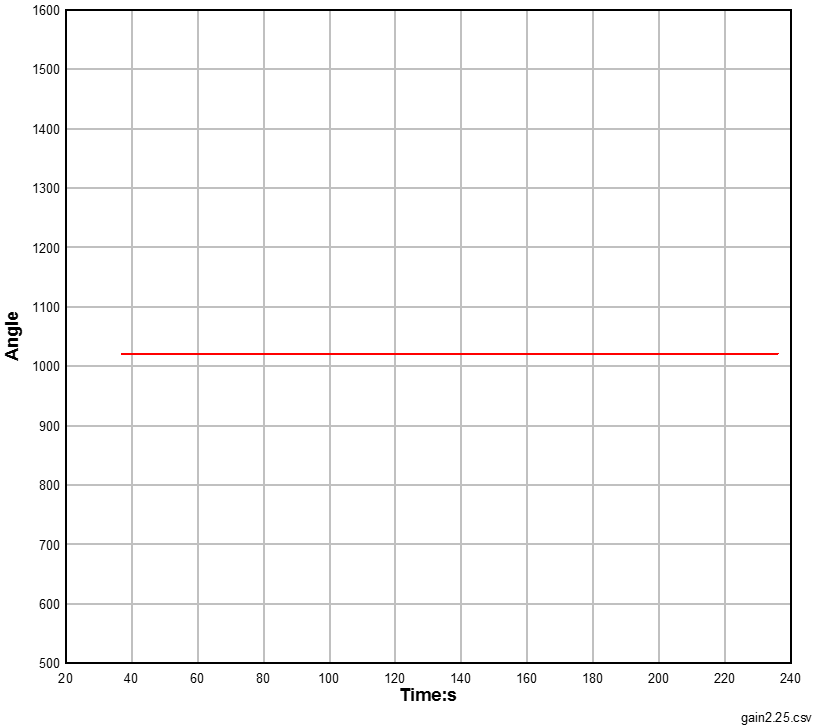
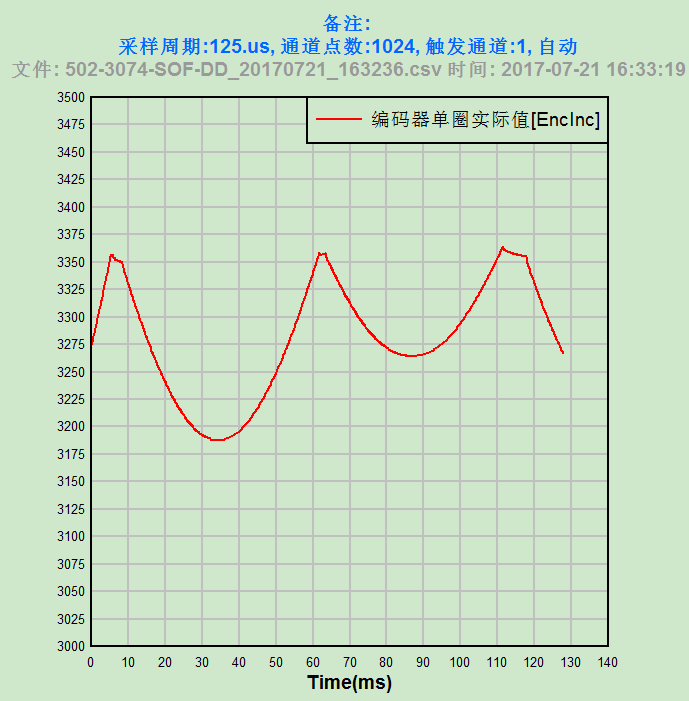
(1)当电机处于固定位置(始终处于sinθ= 0或cosθ= 0)时,存储在DEP_STAT5寄存器中的角度值 始终从2到170增量变化。请 参见下图,这是?的原因是什么
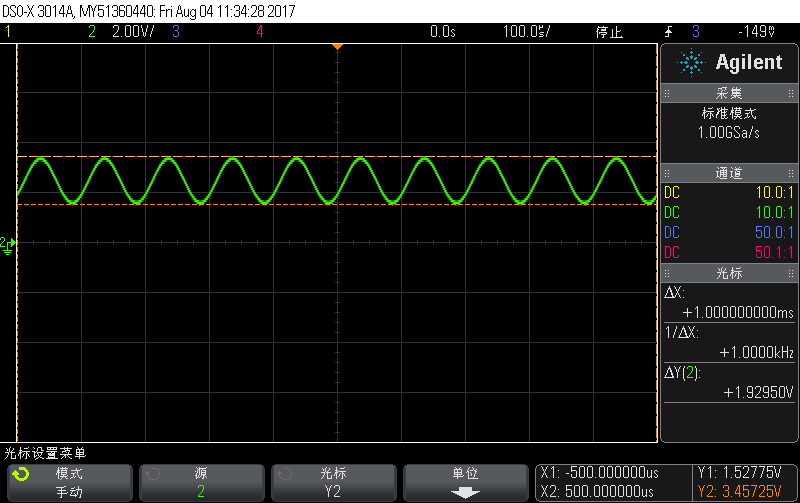
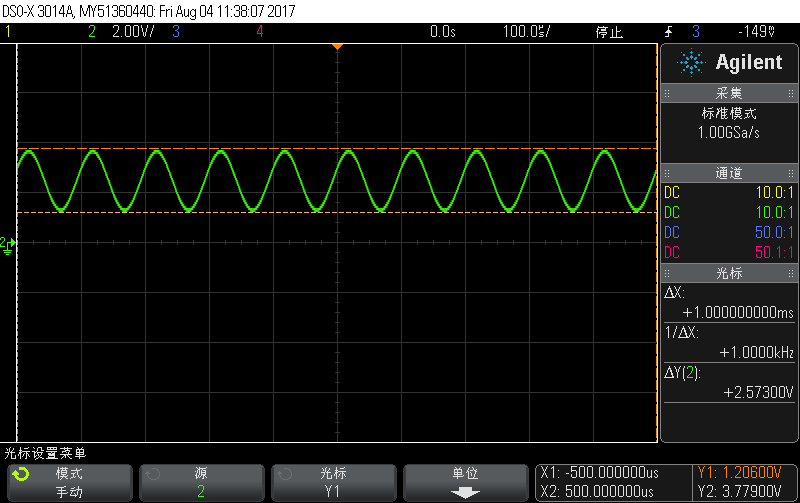
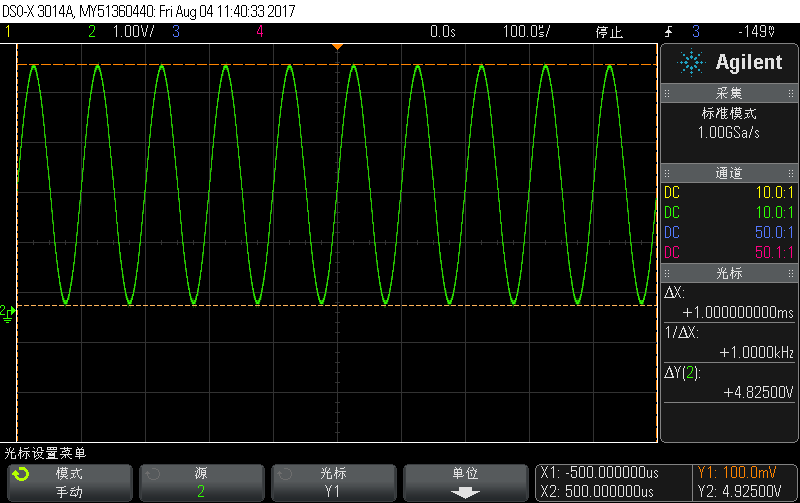
(2) 为了获得最佳精度性能,TI建议在OTIN和Ocos引脚处测量的IZx差动电压(Vpp)介于600 mVpp和1.5 Vpp之间。 OTIN和Ocos引脚上的建议电压和单端荷电位是多少?
此致,
谢谢。