请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN2451-Q1 工具/软件:
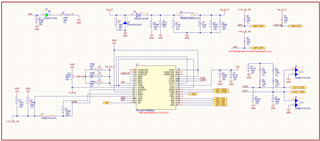
1.请查看适用于 BMS 设计的 TCAN2451-Q1 原理图设计。
输出电压为 VCC1 = 3.3V 且 VCC2 = 5V。 您能否确认、SPI 输出电平是根据 VCC1 为 3.3V 还是根据 5V 而为 3.3V?
3. 根据数据表、nINT 引脚为低电平有效、因此必须使用 3.3V (VCC1) 来上拉或不上拉该引脚?
4. SW 引脚的功能是什么?