Other Parts Discussed in Thread: THVD8000
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:THVD8000 工具/软件:
尊敬的专家:
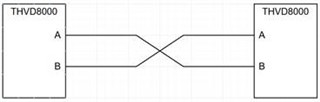
我们希望在项目中使用 THVD8000。 如果我们可以交叉连接两个总线节点上的差分引脚“A"和“和“B",“,这、这将简化布局。 如下所示:

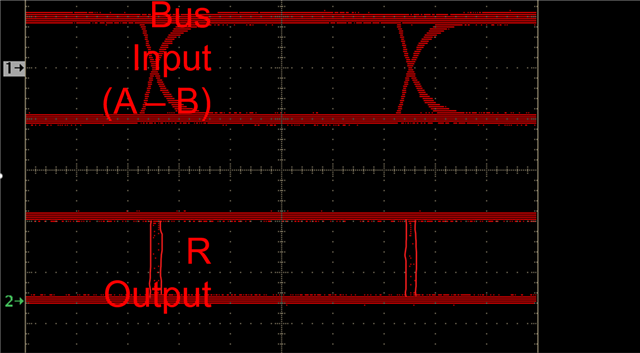
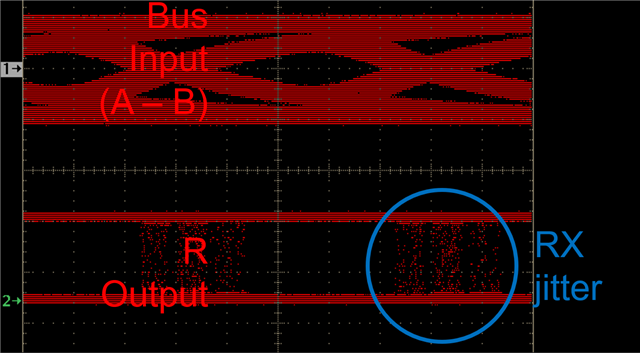
根据数据表、“脉宽失真“会下降。 不过、我不能完全解释这是甚么意思。 这种“脉宽失真“降级意味着什么?
您能就此提供建议吗?
此致