

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:THVD1406Thread 中讨论的其他器件: THVD1400
工具/软件:
先生、您好:
关于 THVD1406、我有以下四个问题:
THVD1406 的原理图和通信架构如下图所示。
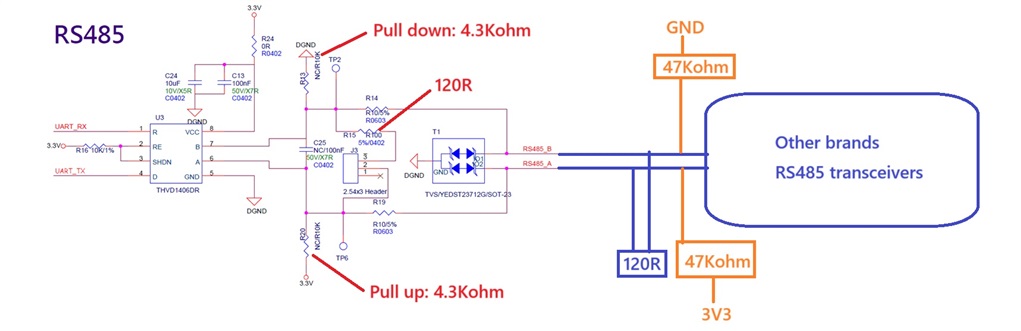
-
我想了解 THVD1406 的输出电压电平为什么取决于是否存在 120 欧姆端接电阻器。


-
我已经从其他品牌测得 RS485 收发器、当应用 120 欧姆端接电阻器时、高输出电压电平和低输出电压电平都明显偏离零电平、这看起来很理想。 这是如何实现的? 与问题 1 中所述的情况相比、电压电平差异的主要原因是什么?

-
如果这种差异是由于收发器型号的选择造成的、则在选择收发器时应考虑哪些特性或规格?
-
如果差异确实与收发器模型有关、产品设计人员应如何决定将高电平电压钳位到接近零的收发器与将高电平和低电平保持在规定的零距离之间?
