Other Parts Discussed in Thread: ISOW1044, TCAN4550
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550-Q1 主题中讨论的其他器件:ISOW1044、 TCAN4550
大家好、
对于下面的客户查询、我们希望请您提供帮助。
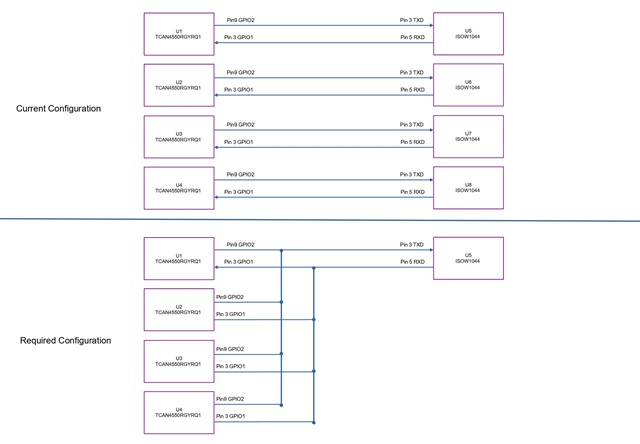
当前、我们有一个客户端产品、 在同一电路板上有4个 TCAN4550RGYRQ1、每个都 通过引脚 GPIO1和 GPO 连接到 CAN 隔离器 ISOW1044
客户端请求通过(GPIO1和 GPO)引脚将全部4个控制器连接到1个隔离器
请建议此配置是否对 TCAN4550RGYRQ1和 ISOW1044都有效
此致、
Danilo.