

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:ISOW1044 工具/软件:
您好、
我们使用的是数据表图11-1中所示的 ISOW1044、包括11.2.1中建议的47uF 电容器。
应用电路的一些例外情况包括:
- EN/FLT 和 V_IO 之间的4.7k 电阻是10k。
- 未连接引脚2 "IN"
- 引脚4"STB"接地(应用电路中的三角接地开路)
- FB 是742792,641,300R @Ω 100MHz
我们不包括可选的端接或总线保护。
该网络是一个矢量 VN1630A 和包含 ISOW1044的 DUT。 120Ω 可以将两端的 TSP 接地。
端接器在总线上、作为120Ω 从 CAN_H 到 CAN_L 我们不使用拆分端接器。
在 DUT 运行过程中、我看到的是 CAN 误差(误差率约为0.3%)、这些误差看来是由 CAN 迹线中的"凸点"引起的。 此碰撞发生在消息的不同阶段、从而产生各种位位置。
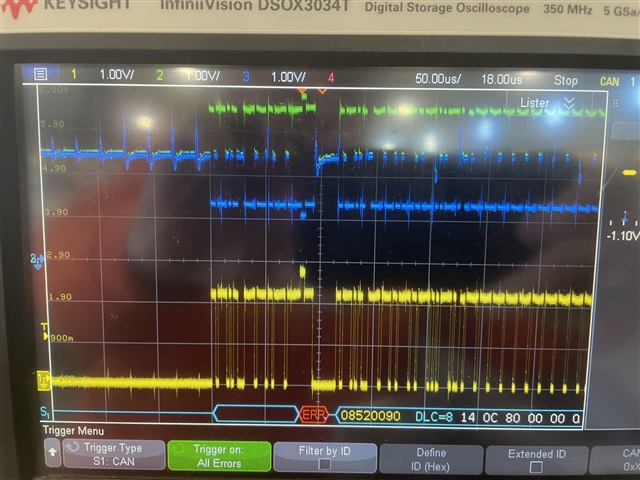
这种情况正在发生、我们面临着一个损失。 我们尝试了各种接地更改(CAN 接地、底盘等) 而不会改变行为。 DUT 是一款机电伺服执行器、可在再生模式下运行。 在 regen 模式下、CAN 错误的发生会增加。
我们正在寻找可以尝试的方法、以便确定这些 CAN 错误的根本原因。
谢谢!
