This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/isolation-group/isolation/f/isolation-forum/1085487/iso1452-how-to-control-de-re-pin-by-gpio-of-soc
您好,
我们使用的是 RS422,在 EE 原理图设计中,我们采用了全双工。
在我们检查了 SPEC ISO1452BDWR 后,PIN 名称 de 和 RE 由来自 SOC 的 GPIO 控制。
我不知道如果我们使用全双工设计,SOC 为什么需要控制 TX/RX。
如有必要,我们如何控制它?
谢谢。
维克
维克,你好
感谢您的帮助。
提供了 DE 和 RE\来启用/禁用设备的相应部分,从而允许设备也在半双工配置中使用,同时还有助于在设备不传输/接收数据时最大程度地降低功耗。
如果您希望分别保持 DE 和 RE\永久连接到高位和低位,那么这样做完全可以。 请注意,如果驱动程序和接收器一直处于启用状态,则它们在传输/接收数据和不传输/接收数据时会消耗几乎相同的电量。 这对驾驶员来说更重要,因为与接收器相比,驱动器的功耗要高得多。
如果功耗不是问题,那么在始终启用驱动器和接收器方面绝对没有问题。
如果你还有其他问题,请告诉我,谢谢。
此致, 科特谢瓦·拉奥
你好 ,科特 eshwar,
感谢你的回复。
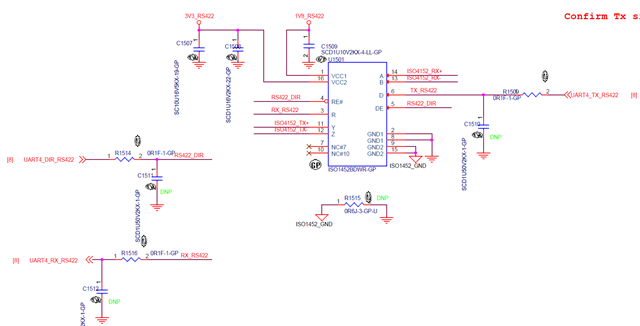
下面 是我们的示意图,您能否帮助查看我们的全双工设计。
SoC GPIO1_B1连接到 UART4_DIR_RS422。
UART4_DIR_RS422连接到 DE 并重新连接。
根据 ISO1452规范,如果 SOC 始终设为偏高,则重新输出将被禁用 ,反之亦然。
这意味着我们不能同时启用驱动程序和接收器,对吗?
如果功耗不是一个问题,我们应该用两个针脚来控制全双工的功耗吗? 我是对的吗? 谢谢!
感谢您提供进一步的意见和分享该示意图以供审核。
您的理解是正确的。 但我还想指出,只有当驱动程序想要传输数据时,才能启用驱动程序,如果您不传输数据,那么保持驱动程序启用是没有好处的。 因此,通常的做法是在默认情况下保持引脚低电平,以便启用接收器,并且总线上的任何数据都将一直被接收。 基于通信,当需要传输数据时,快速将数据解/反向设为高,传输数据,然后快速将数据反向复位为低,并等待从总线听到声音。
是的,您的理解是正确的。 如果不考虑功耗,则单独控制和关闭再重新打开是非常好的。 另一种常见做法是保持永久接地,以便始终启用接收器,并使用 GPIO 控制 DE,仅在需要传输数据时才启用驱动器。
关于原理图,我相信我们已经通过您当地的 TI 代表收到了您的原理图供审查。 我认为下面的示意图是最新的,其中 SIDE1和 Side2电路仅参考了各自的本地 GND。 它还在总线上提供良好的电视保护,以保护 EMI。
仅为了确认,基于我们当前的布局设计,我们无法通过 UART 4_DIR_RS422 (仅一个引脚)执行全双工,我对吗?
如果我们想使用完全开脱罪责的方法,我们如何在 SOC 和 RS422之间建立起联系?
例如:
1.
SoC UART RTS (输出)--> DE
SoC UART CTS (输入)<-- R\ ?
或
(使用其他 GPIO 引脚控制 RE)
SoC GPIO (输出)->重建\
此致,
您的理解是正确的。 如果 DE 和 RE\绑在一起形成一个引脚,则您只能启用驱动程序或接收器,一次一个。 因此,采用这种设计无法实现全双工。
DE 和 RE\引脚是输入引脚,因此需要由外部信号或静态电压驱动。 只要您能够控制任何针脚,就可以将任何针脚从 SOC 连接到 DE 和 RE\。 正如我前面提到的,您甚至可以通过将 RE\连接到 GND1并使用来自 SOC 的外部信号驱动 DE 来始终启用接收器,以便仅在传输数据时启用接收器。 客户需要选择自己喜欢的选项。
RE\是一个输入引脚,因此,要由有效信号驱动,需要从 SOC 连接到输出引脚。 因此,上述突出显示的连接不正确。
这很正常,因为两个输出针脚驱动输入针脚 DE 和 RE\。 谢谢。
感谢您的即时支持!!
没有其他问题。