Other Parts Discussed in Thread: ISO1050
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ISO1050 工具与软件:
你(们)好、
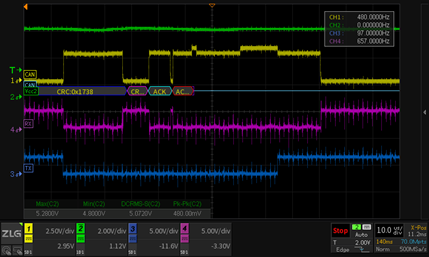
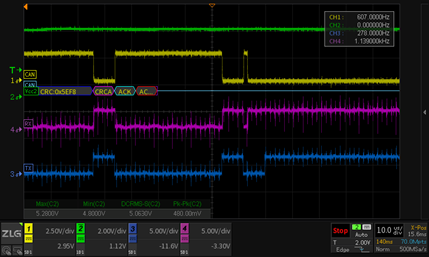
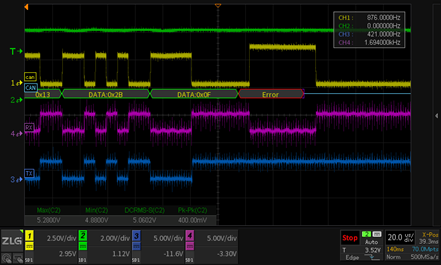
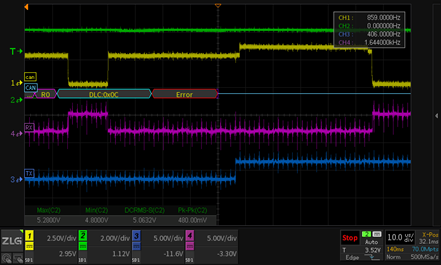
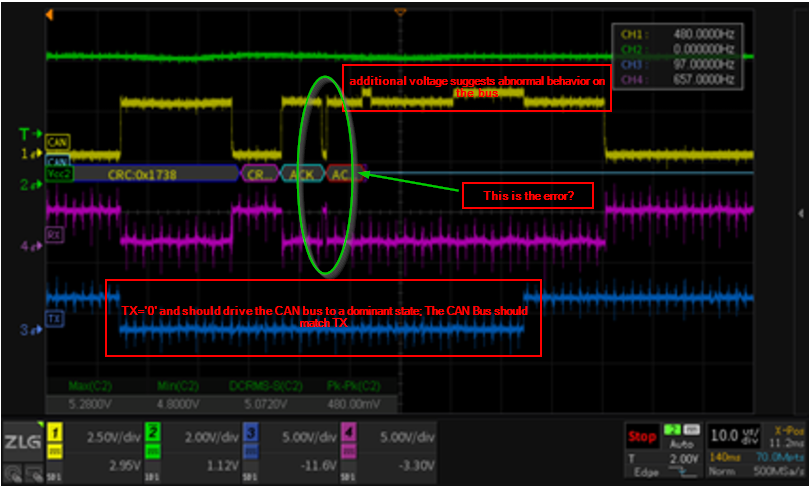
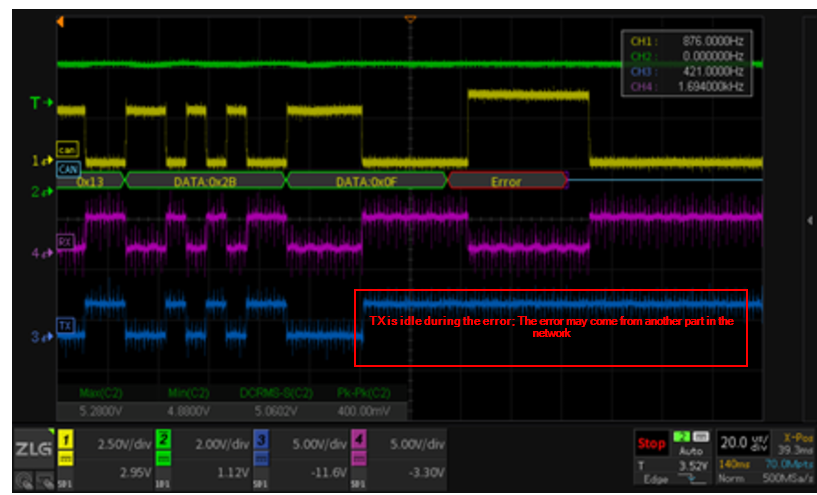
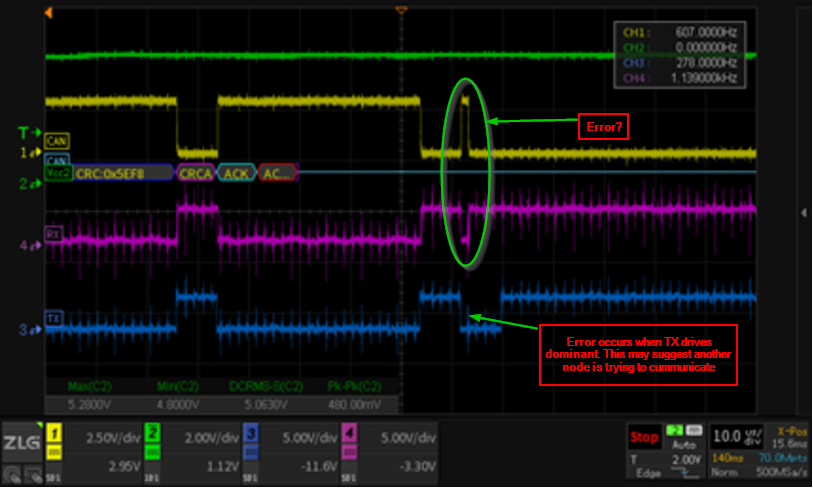
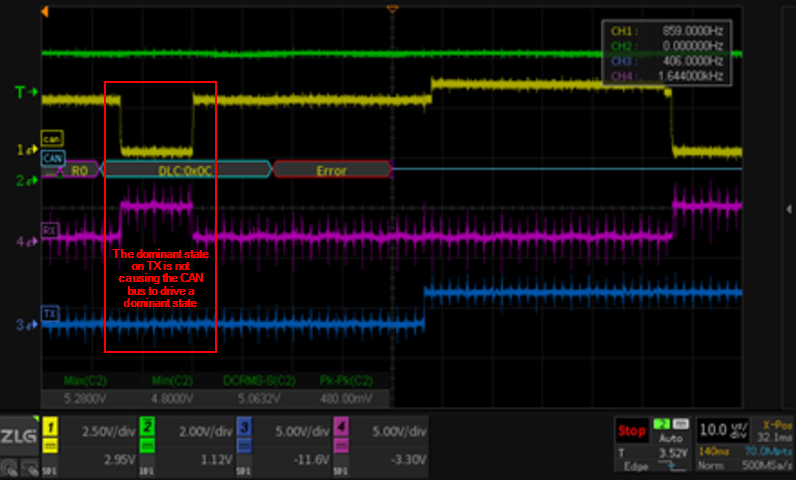
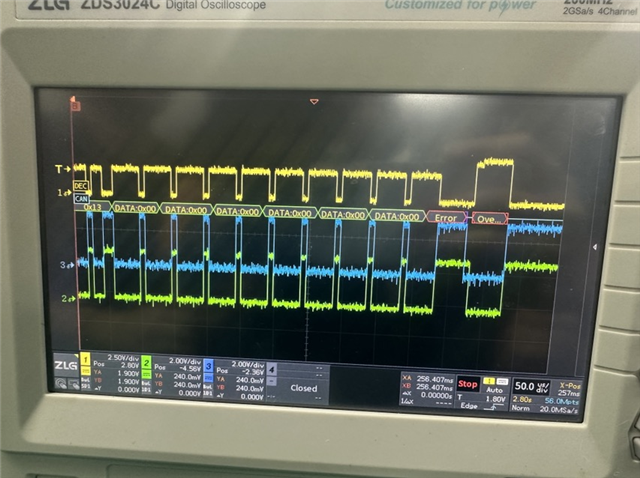
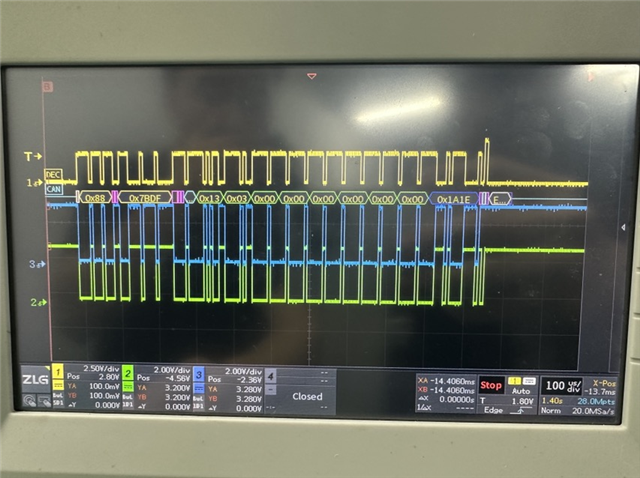
这是 Aa3深圳团队的赛门。 我的客户在其产品中使用了 ISO1050、发现其误差率很高。 他们确定了器件的信号范围、结果如下所示。
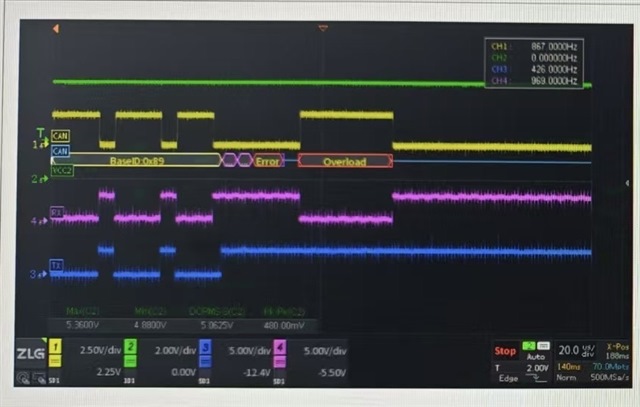
黄色是 CAN 差分信号。 绿色是 VCC2。 紫色为 RX。 蓝色为 TX。
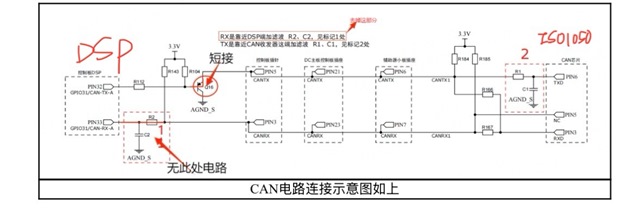
原理图如下所示。
VCC2似乎稳定、未超过建议的范围。 您能帮忙解决这个问题吗?
谢谢
深圳雷夏