主题中讨论的其他器件:CSD88599Q5DC、
工具与软件:
您好、TI 团队:
我已经使用 DRV8323SRTAR 和 CSD88599Q5DC FET 设计了一个定制 PCB、用于驱动三相 PMSM。
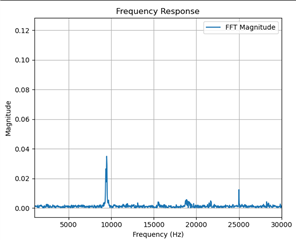
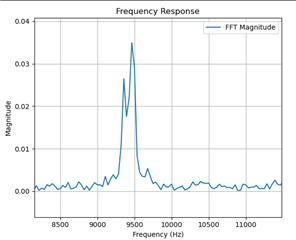
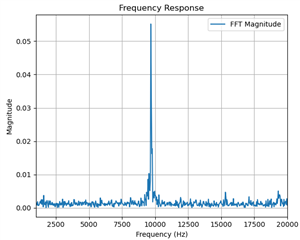
即使命令扭矩为零、在~8.5kHz 时也会出现可闻噪声问题。 我将尽可能详细地解释我已执行的情况和测试。
使用的电机是 R080 KV105 Lite。
电源电压为48V、但电压较低时也会出现问题。
我知道48V 电压高于 TI 的推荐值、我们设计了一种电压翻盖电路、以防止因电机制动而出现过压。
靠近 FET 的电源上的大容量电容约为500uF。
每个相位都有一个 RC 缓冲电路。
为了找到问题所在、我已完全删除所有 PI 控制器。
我命令在所有3个相位上具有50%的占空比、这意味着顶部3个 FET 在50%的时间同时导通、底部3个 FET 也是如此。
根据我的理解、这应该会导致电机中没有电流流过、我希望电机静默。
使用具有交替反向排序和 Iq、Id PI 控制器的 FOC、SVPWM 时、电机也具有噪声。
我试过的(所有测试在没有 PI 控制器的情况下执行、只有50%的占空比)
我已尝试断开电机连接、以消除噪音。
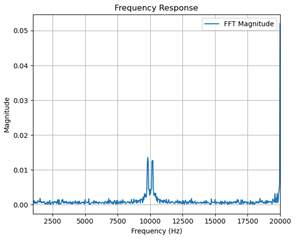
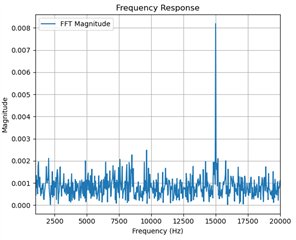
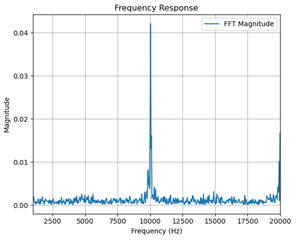
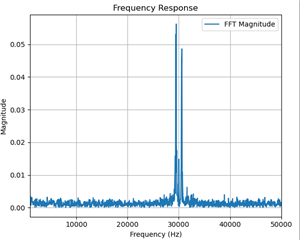
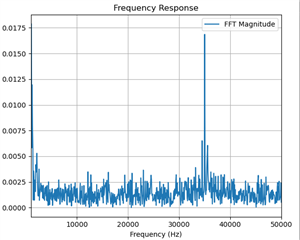
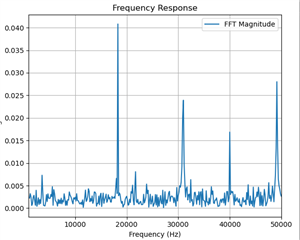
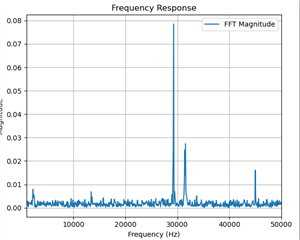
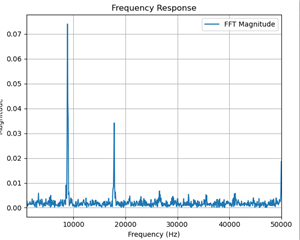
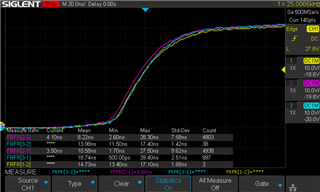
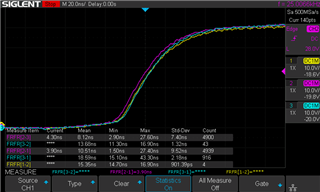
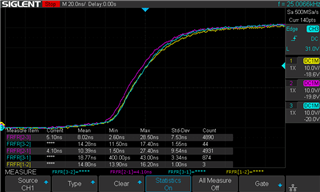
我已经尝试在10kHz 至50kHz 的范围内减小和增加 PWM 频率。 对于某些频率、可闻噪声在8.1kHz 时占主导地位、而对于其他 PWM 频率、可闻噪声在8.7kHz 时占主导地位。 目标 PWM 频率为25kHz
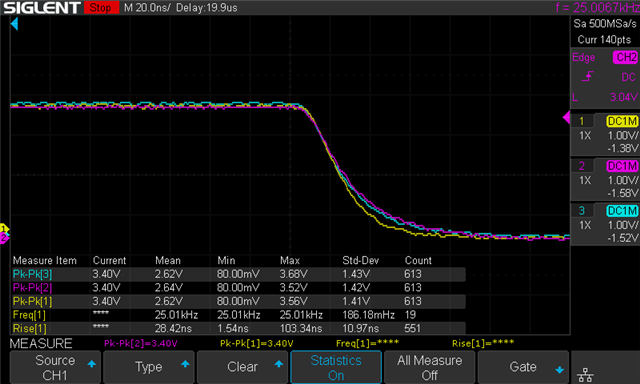
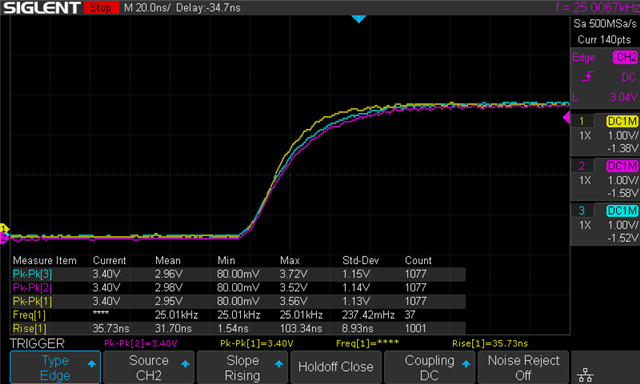
我已经尝试了调整栅极驱动强度和测量 VGS、信号看起来干净而没有任何纹波。 当前、栅极驱动强度配置为在~200ns 的上升/下降时间。
我已经尝试在示波器上测量 CPH 和 VCP。 VCP 上升至 VM+12并下降至 VM+10.5。
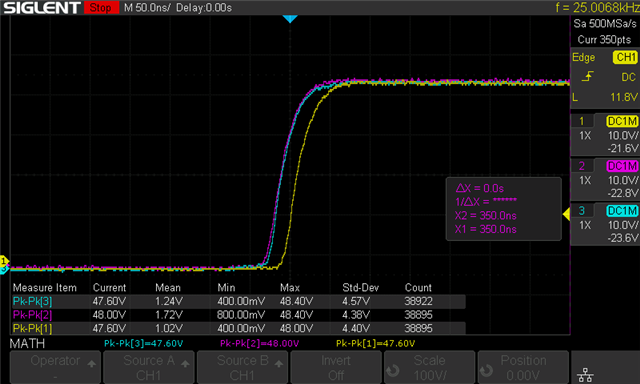
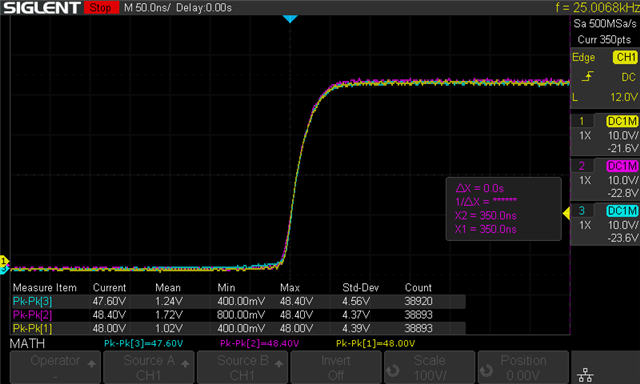
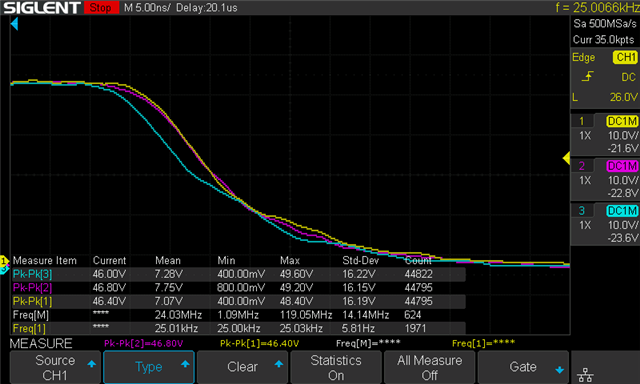
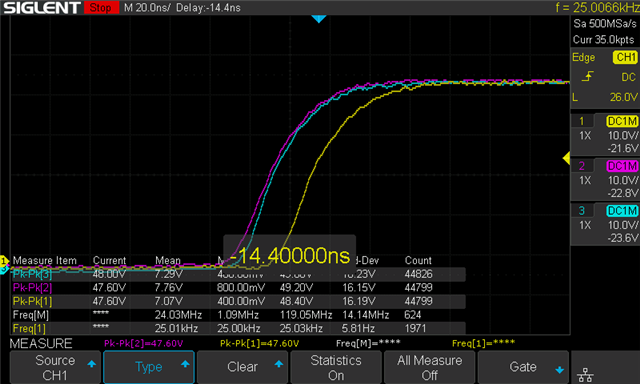
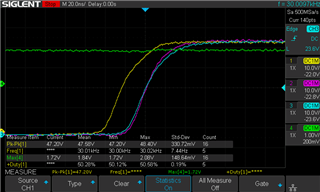
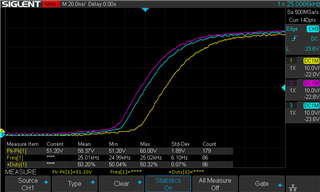
我已经尝试使用示波器测量相电压。 在这里、我主要看到所有3个相电压同时上升/下降。 但我有时会随机看到其中一个相电压延迟了±20ns、我很担心这可能是产生可闻噪声的原因。
我测试了2个不同的 PCB 和2个不同的布局、问题仍然存在。
我测试了2个不同的电机、问题仍然存在。
我测量的电源电压没有明显的纹波。
我已尝试调整死区时间、但没有任何变化。
我一直监控着河的 nFault、它永远不会变低。
对于如何解决这一问题的任何支持都将不胜感激。
如果需要、我能够提供示波器测量的图片。
原理图和布局也可直接与 TI 员工共享。
期待收到您的回复
此致、
Mads.