Other Parts Discussed in Thread: DRV8889-Q1, DRV8889-Q1EVM
Thread 中讨论的其他部分:DRV8889-Q1、
工具/软件:
你好。
我正在使用 RH850、DRV8889和 DRV8889驱动一个电机。
DRV889的 EVB 电路板设置在9V、全步进、600PPS、1.5A (VREF 3.3V)和 扭矩限制的31.25%下具有良好的 TRQ 计数输出。
但是、在我的控制器中、TRQ 值已输出并且发生故障。
条件为9V、全步进、600PPS、VREF 约为2.97V、 扭矩限制的31.25%。
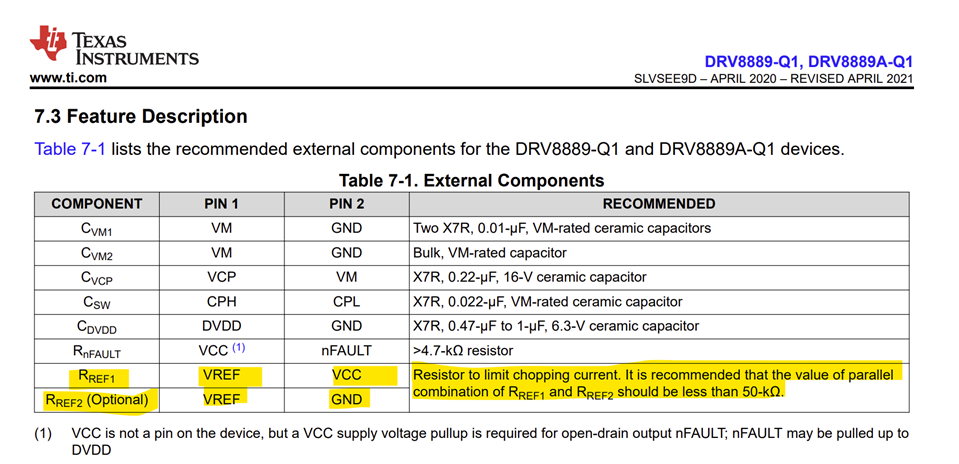
我预计 MCU 的电压为5V 时电压为3.2V、电压为68K、电压为130K、但实际电压为2.97V。 大约是1.35A、对吧?
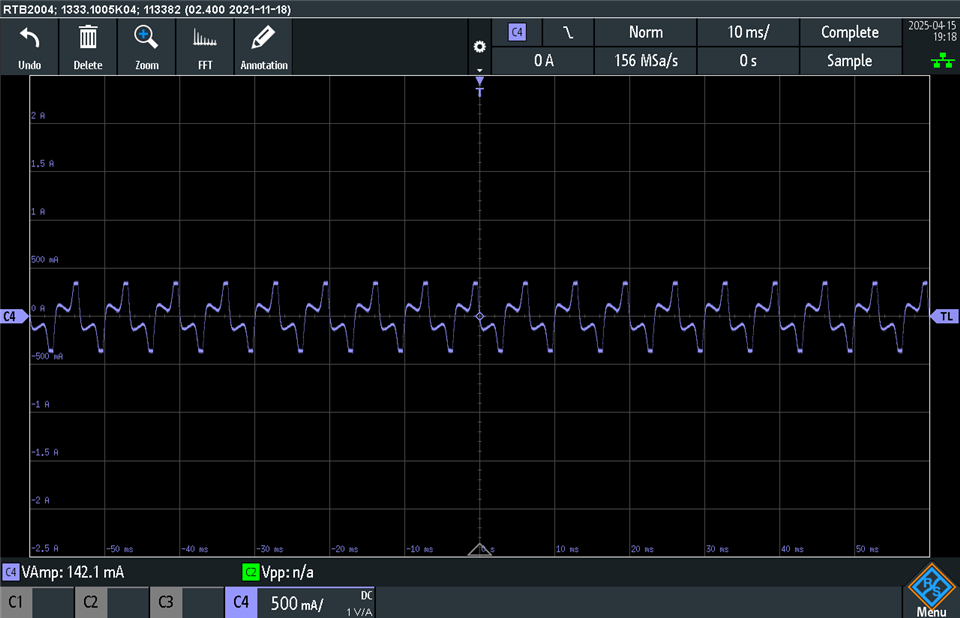
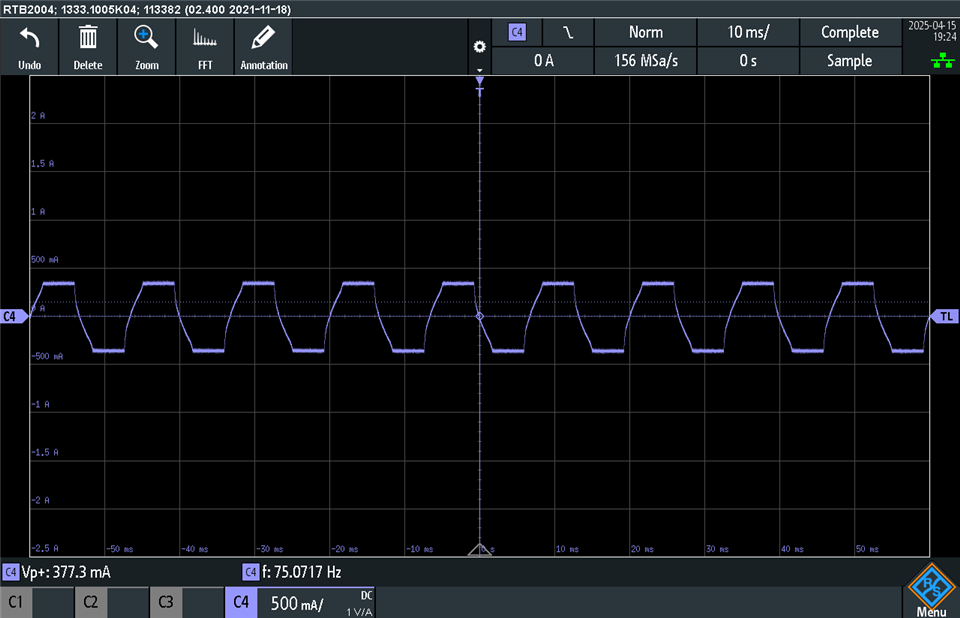
我测量了 EVB 板、控制器以及 A 和 B 电机的 A+输出引脚和电流波形。 您可以检查该文件吗?
我注意到这里有一些奇怪的东西。 在输出波形的末尾、EVB 板和控制器之间的差异很明显。
这是称为 BEMF 的器件吗? 但我不确定这意味着什么。 您能解释一下我的控制器波形的问题吗?
我不确定 EVB 板是否每次向 SPI 发送 TRQ 计数、但该值是可读的。
但是、我的控制器在特定电压下固定为零、或者以这种方式与正常值(如0190、0185)重复相交。
有没有让 TRQ 计数更具可识别性的提示? 例如、每特定时间(当前为2ms)向 SPI 发送 TRQ 计数、或将 VREF 设置为3.3V。 或将步进分解为微步进、而不是全步进。 如果有任何推荐的优化值、请帮助我。
如果我调整步长、是否正确增加、例如全600 >一半1200 > 1/4 2400PPS?
如果我未检测到失速、则使用 FAULT 功能或 STALL_TH 停止电机、但只接收 TRQ 计数值作为 SPI、并检测到低于失速限值140的值连续设置为变量值10次。 有更好的方法吗?
我尝试使用故障、但我成功地识别并停止了电机、但之后我没有成功采取进一步的措施。
OH 此外、为改善 EMC 特性、我为 A+、B+、A-、B-输出端口各添加了100nF 的去耦电容器。 这会产生影响吗?
电机绕组电阻为正6欧姆。
我的问题可能很困难,但我希望你能帮助我。