请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 工具/软件:
您好的团队、
我的客户正在评估 DRV8889-Q1并遇到阶跃损耗问题、您能提供一些建议吗? 谢谢。
1. 您能帮助我们分享哪些可能是失步的潜在原因吗?
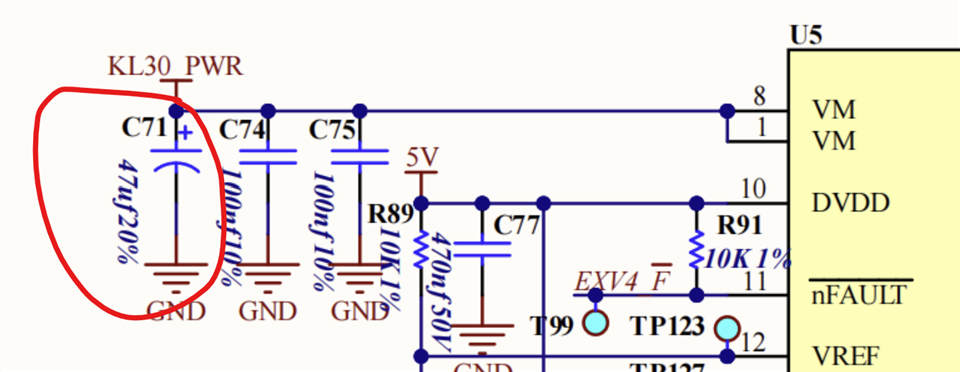
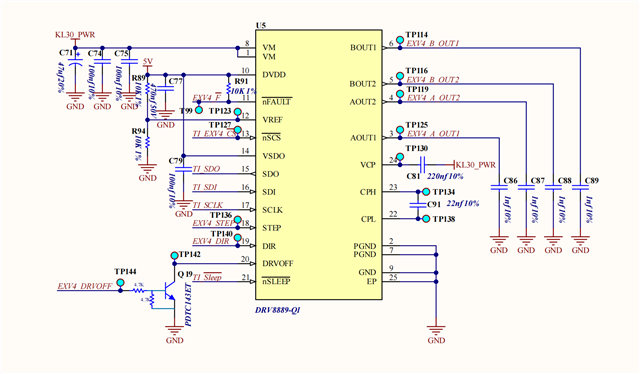
2.以下是客户的原理图,您能帮助审阅并给出一些意见吗?
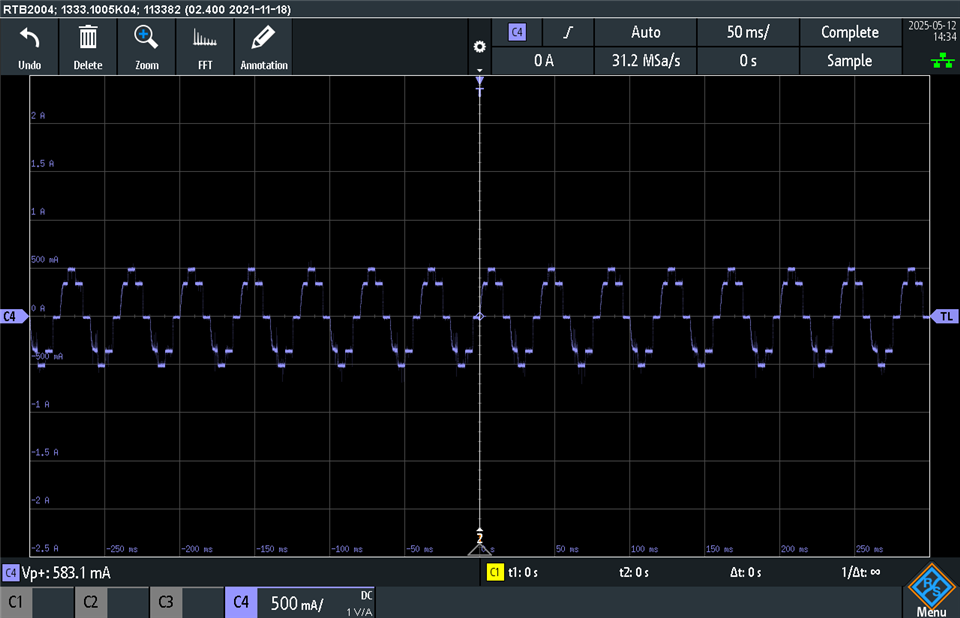
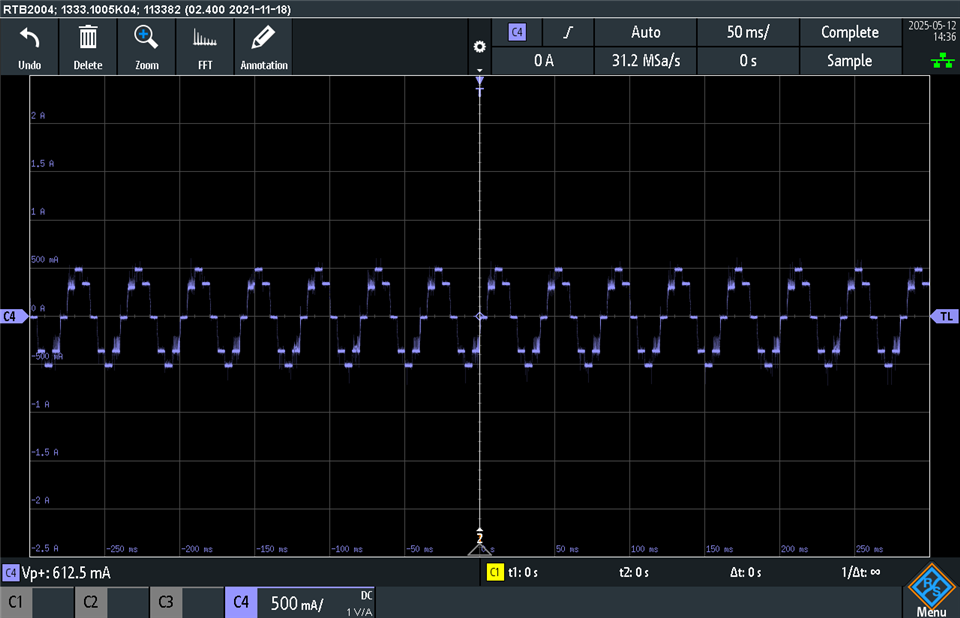
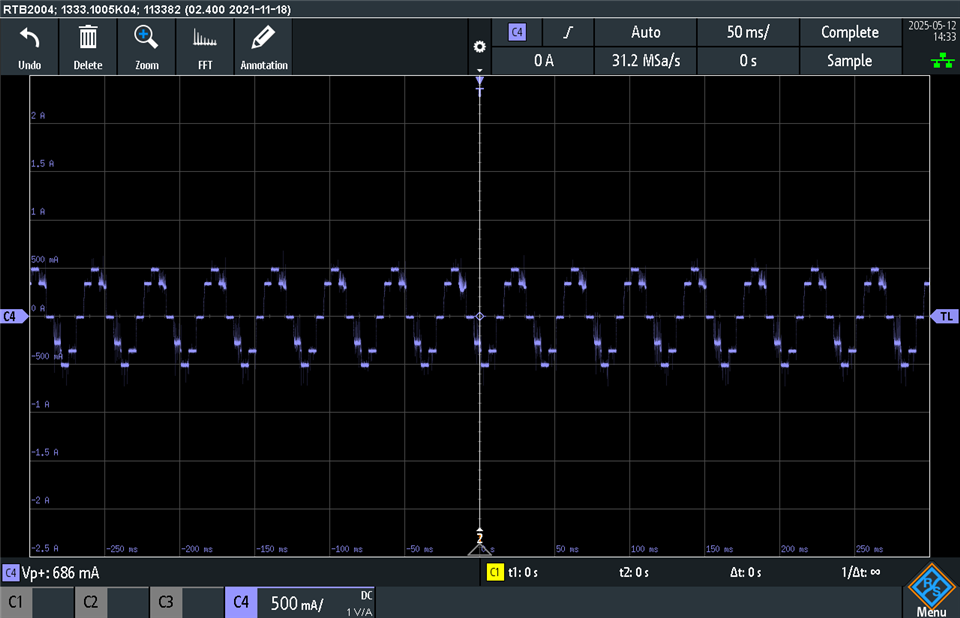
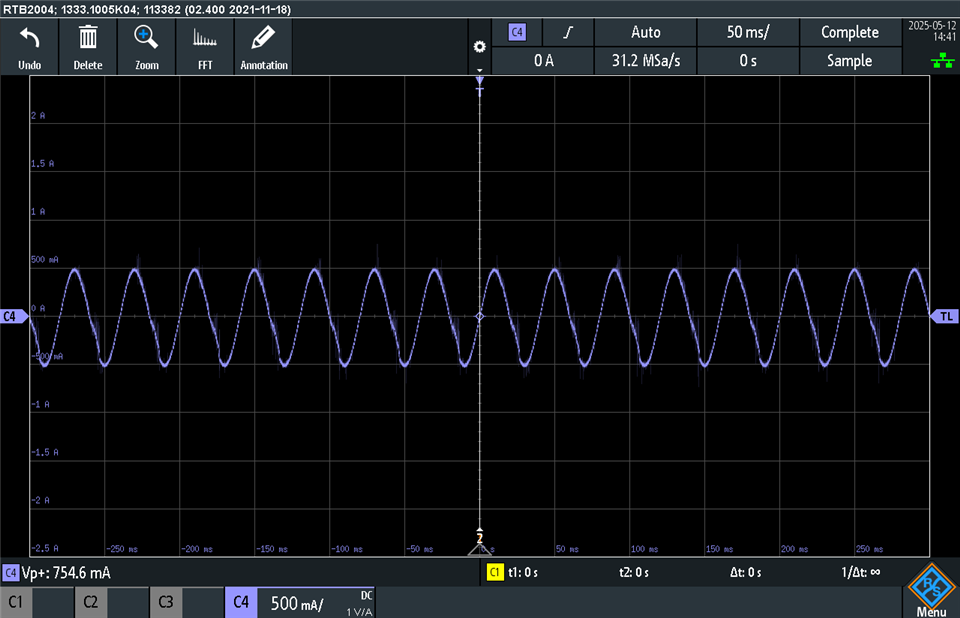
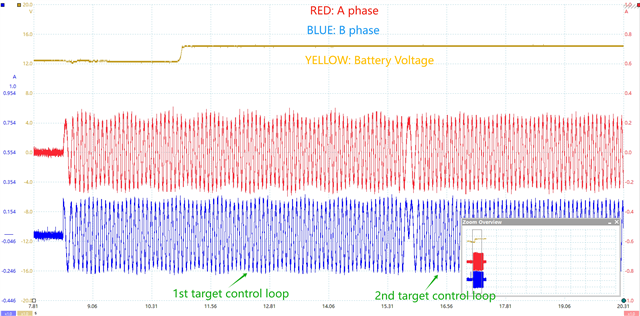
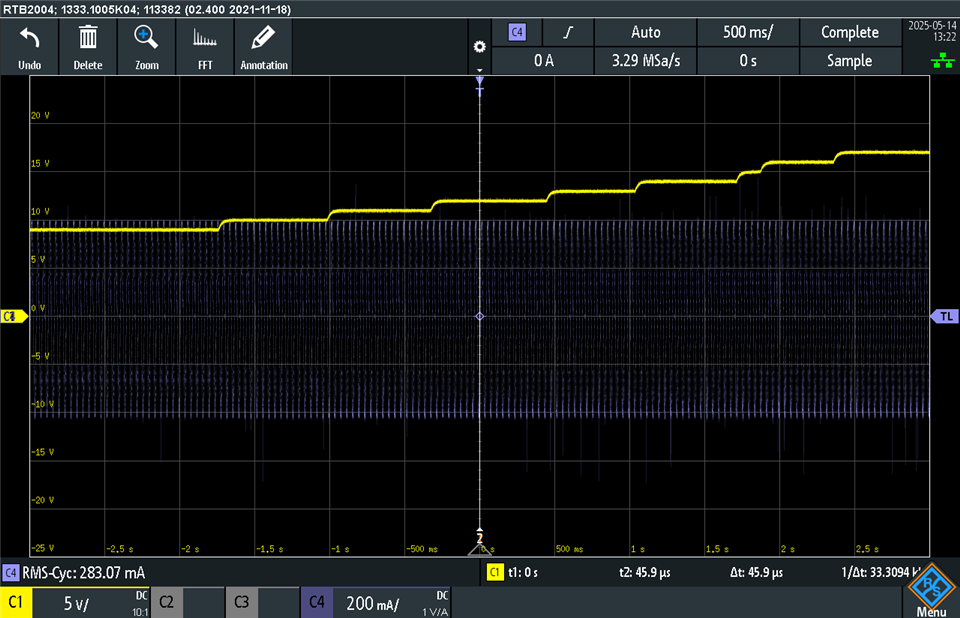
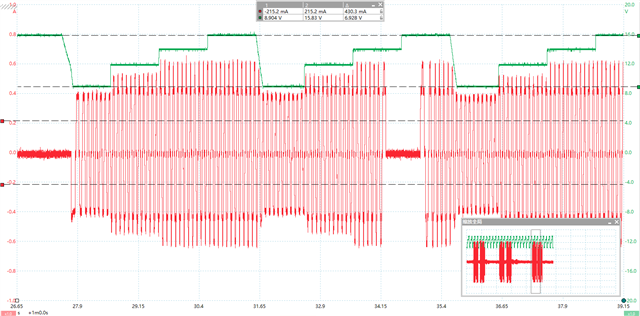
3. 在测试中、客户发现、当 DRV8889-Q1配置为1/2步进时、输出相电流在 VM 之间有很大差异、如下图所示。 然而、当 DRV8889-Q1配置为1/16步长时、不同 VM 的输出相电流值基本相同。 我想问为什么会这样呢? 理论上、输出相电流应该与 VM 无关。
DRV8889-Q1原理图:
1/2阶跃、VM=9V 或16V、绿色波形为 VM、红色波形为输出相电流。
此致、
常春藤