请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8305 主题中讨论的其他器件:LAUNCHXL-F28379D、 LAUNCHXL-F28027F、 MOTORWARE、controlSUITE
工具/软件:
尊敬的团队:
我正在使用带有 LAUNCHXL-F28379D 板的 DRV8305 BoosterPack。
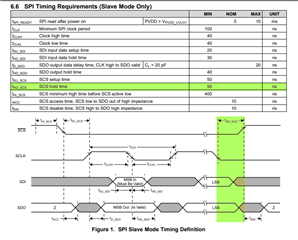
我已将 SPI A 配置为通过 SPI 与 Booster Pack 通信。
我正在尝试写入和读回 SPI 寄存器以确认 SPI 是否正常工作。
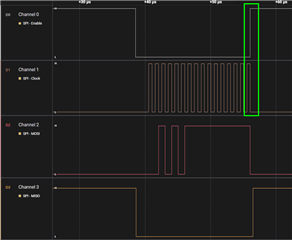
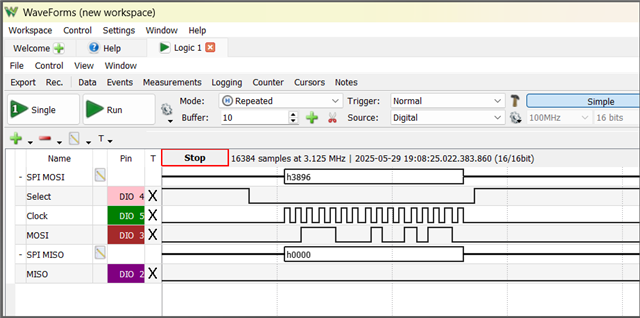
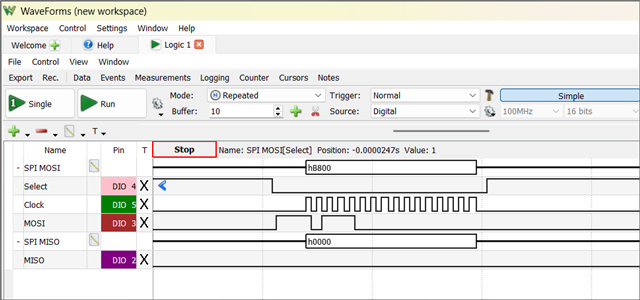
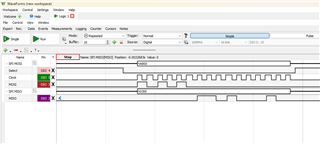
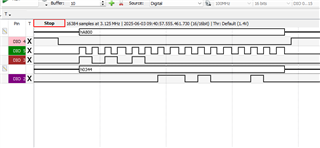
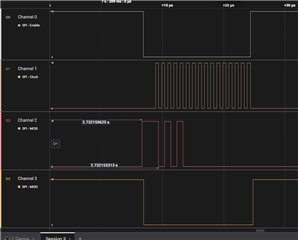
可以看到 SPI 写入未成功进行。 我在写入寄存器后读回寄存器。
以下为写入命令的波形- 0x2BFF;/* 0b00101 011 1111111111*/;
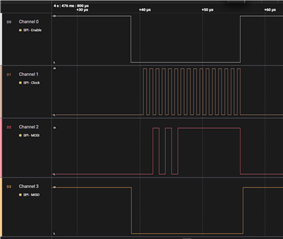
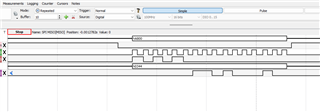
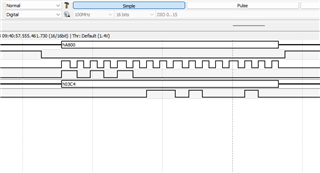
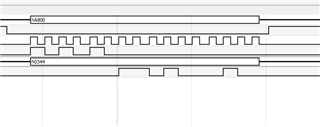
下面是读取命令的波形- 0xA800;/* 0b10101 000 00000000 */;
_ 
我为 BoosterPack 提供了20伏电压、并设置了 EN_GATE 引脚
下面是我的代码:
while (1)
{
SPI_writeDataNonBlocking (SPIA、0x2BFF);
R1Data = SPI_readDataBlockingNonFIFO (SPIA);
device_delay_US (10000);
SPI_writeDataNonBlocking (SPIA、0xA800);
R1Data = SPI_readDataBlockingNonFIFO (SPIA);
}