请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8962工具/软件:
您好、
*不一定是“电机驱动器论坛“,但此选项是强制的。*
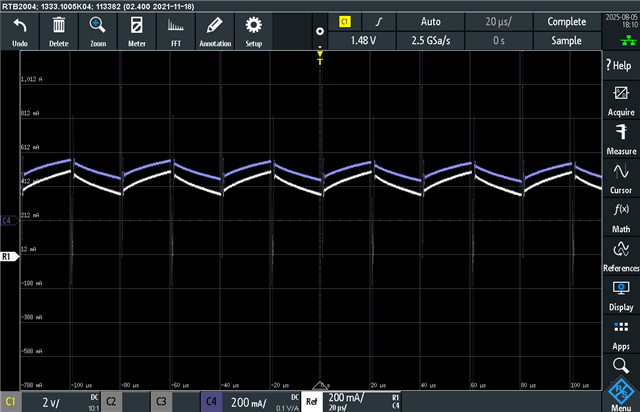
对 DRV8962DDVR 的数据表中的问题。 第 7.4 节介绍了快速衰减和慢速衰减模式。 本文提到、在快速衰减模式下、输出关断且电流通过体二极管再循环;在慢速衰减模式下、低侧 FET 导通并主动对输出进行短路。 这些的定义是切换的还是正确的? 对输出短路的速度可能不会最快。
此外、我的以下理解是否正确?
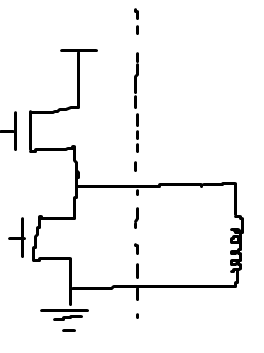
该芯片可用作全开/关开/漏输出(高侧 FET 禁用)、所有开/关开/源输出(低侧 FET 禁用)或高侧和低侧 FET 交替开启和关闭的 PWM 模式? 根据 in/en/等选择这 3 种模式之一 设置? 它可以在这些模式中的任何一种模式下运行是否正确?
谢谢、
标记