Other Parts Discussed in Thread: MCF8329A, MCF8316A
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8329A主题中讨论的其他器件: MCF8316A
工具/软件:
我正在测试 mcf8329A EVM 板。
使用 8 极电机时、瞄准应用的转速为 16k rpm。 电流高达 6A。
输入电机的机械极点、电阻器和电感(由 LCR 测量)。
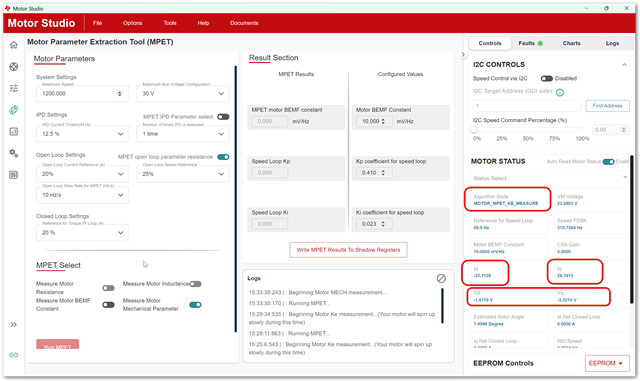
并尝试通过使用快照运行测试来调整机械参数
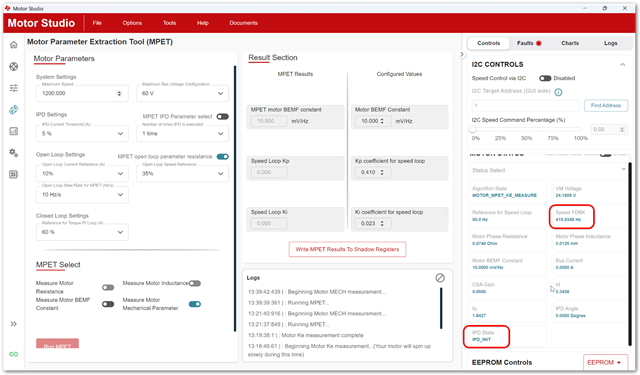
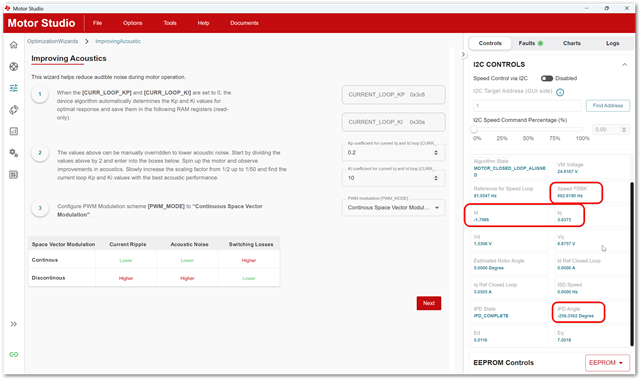
电机以 400Hz 的频率旋转、但看起来它仍处于 IPD INIT 阶段。 这是如何发生的?
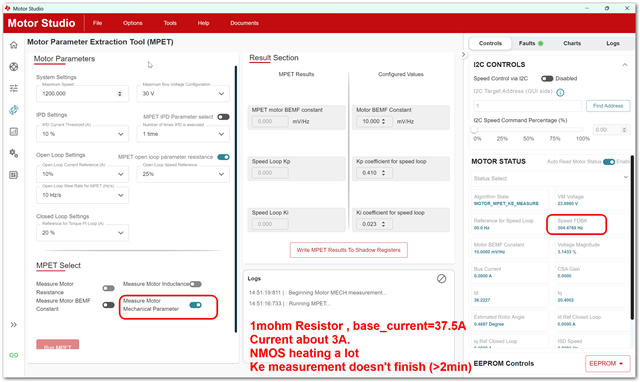
MOSFET 运行得非常热。 电压为 24V、电流约为 2A。
我必须在电动机烧伤之前停止运转。
如何调整参数?我应该上传 csv 寄存器值吗?
谢谢