请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316C-Q1Thread 中讨论的其他器件:MOTORSTUDIO
工具/软件:
您好、
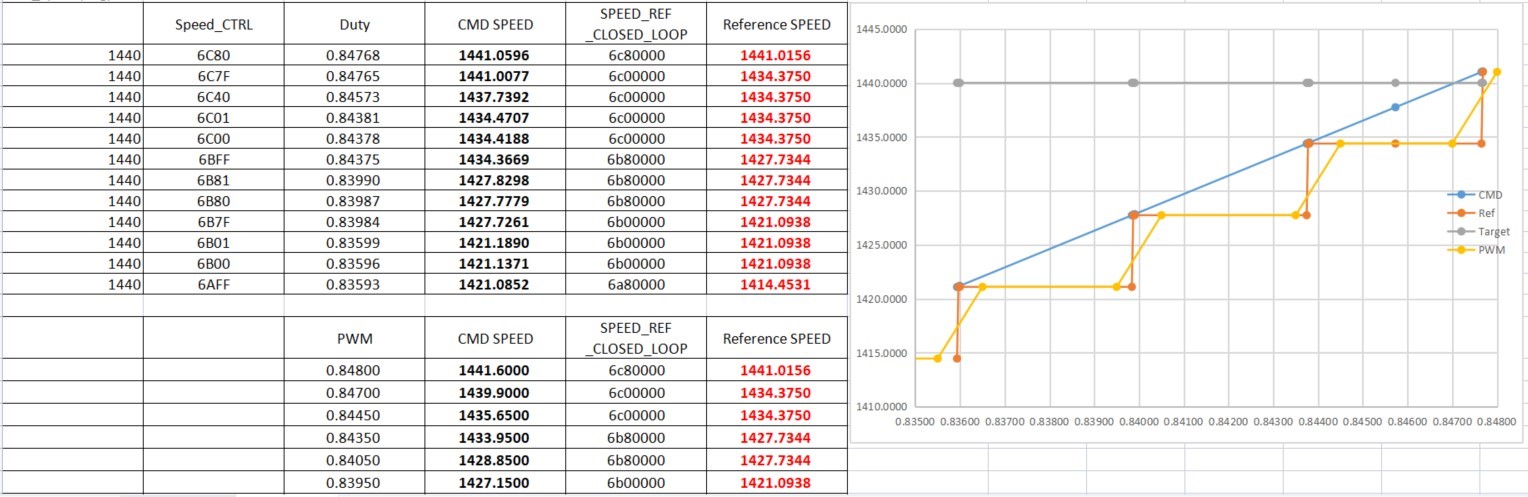
我的客户使用 MCF8316C 以 14,400RPM 的速度运行电机 PLL 旋转以控制 BLDC 电机、我们对速度命令分辨率有疑问。
使用 GUI I2C 接口验证速度命令分辨率时、我们发现实际可用速度命令仅为 8 位。 此外、MCU 基于 PWM 的速度命令 (10kHz) 还确认速度命令分辨率为 8 位。 根据之前的实验、8 位速度命令分辨率无法在 14,400RPM 下实现稳定的电机索引 PLL 控制。
问题:
1. MCF8316C 是否有其他方法来提高速度命令分辨率?
2.是否有其他支持更高分辨率的 TI BLDC 电机驱动器?