

Other Parts Discussed in Thread: DRV8844
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: DRV8844
尊敬的 TI 团队:
我正在按照数据表中的以下逻辑开发 DRV8844 全 H 桥驱动螺线管的控制逻辑:

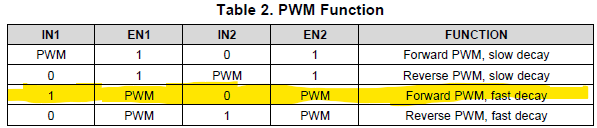
现有的算法逻辑基于支持快速衰减的正向 PWM。
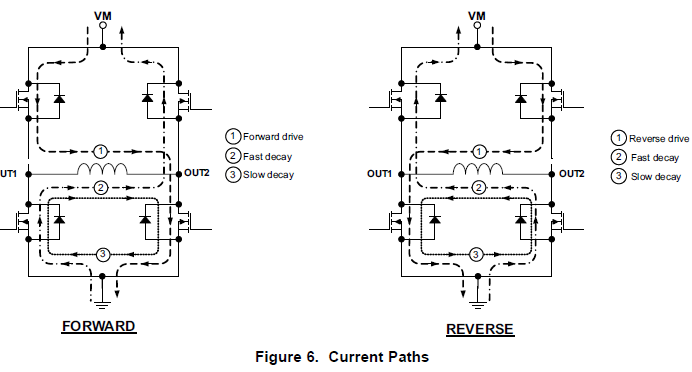
数据表的下图 6 显示了正向驱动和快速衰减期间的电流流动
我希望使螺线管释放时间比快速衰减更短。 我执行了以下步骤:
1) 正向驱动后应用非常短的死区时间 (3us);
2) 施加 1500uS 的反向驱动,但直流高而不是 PWM ;
3) 向前滑行结束
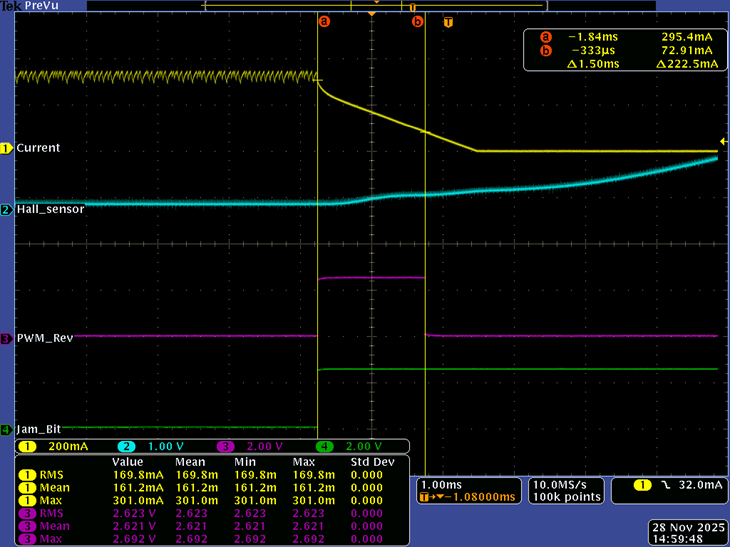
理论上、H 桥允许我们主动反转螺线管上的电压极性、从而产生强大的反向力以快速拉低电流。 但问题是、当前在前进海岸之间衰减和应用反向驾驶没有区别。 TI 团队是否有任何建议?




