Other Parts Discussed in Thread: MCF8316D, MOTORSTUDIO
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: MCF8316D
Thread 中讨论的其他器件: MOTORSTUDIO
我的 MCF8316D 出现问题。
该器件会执行启动编程序列。 电机发出“块“声音、然后无法旋转。
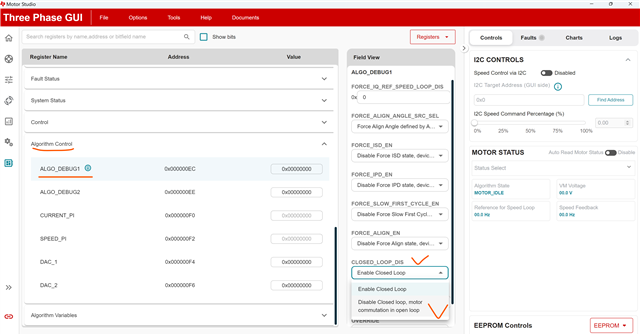
栅极故障寄存器读数为 0x0
控制器故障寄存器读取 0x82000000(MPET IPD 故障)
故障配置 2 寄存器:0xF55348F8
最小 VM 模式设置为 1(自动间隙)
最小 VM 电机为 0 (5V)
我让它读出了它可以读取的电机参数、它们都是 0(0 电机电阻、0 BEMF 常数、0 电机电感 — 我假设是由于 MPET 序列失败)
同样值得一提的是、我尝试了各种电流阈值、但找不到任何有效的阈值。
电机启动 1 寄存器:0xCB080390(启动方法 2,但两者都不起作用)
接线原理图: 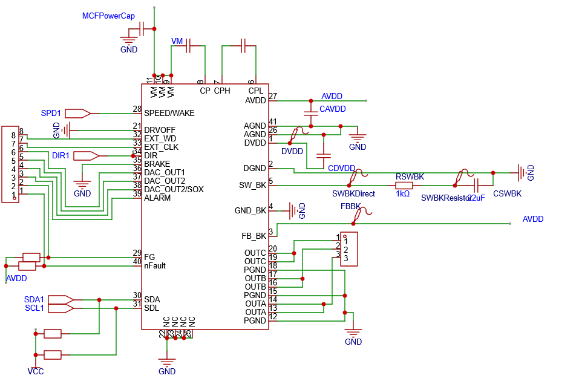
电动机已插上电源、据我所知、所有 3 极的接线都完好无缺。
编辑:我尝试禁用 MPET 序列并手动插入电机参数、但 1) 芯片不读回电机参数;2) 电机不旋转、因此回到方形。

 图示:电机的背面、铝制螺栓穿过、磁体粘在螺栓上。
图示:电机的背面、铝制螺栓穿过、磁体粘在螺栓上。