请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8705-Q1 您好,专家,
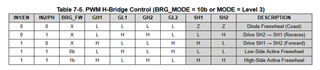
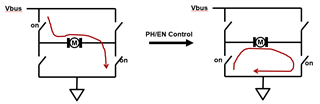
我对 DRV8705-Q1 PH/EN 控制和 H 形电桥 PWM 控制模式有疑问。 这两种控制模式的主要区别是什么?
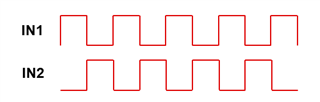
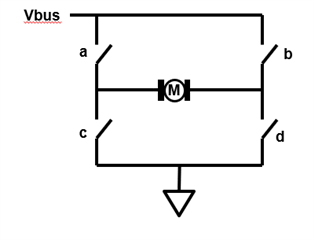
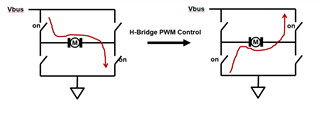
据我了解,在 SH1至 SH2驱动期间 ,主要区别在于马达绕组飞轮控制的方式? 下图显示如下
电动机绕组飞轮控制的主要区别是什么? 如下所示
正确吗?
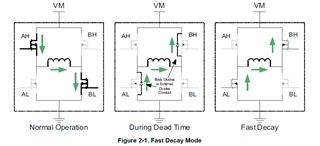
另一个区别是 H 形电桥有二极管飞轮,但这种方法会有更多的耗散量,我的客户说这种方法没有被大量使用。 还有事吗?
谢谢!
温文