请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8711 我的新DRV8711电路驱动步进器时,遇到一些奇怪的谐波噪音。 当确定当前波形范围时,很明显,其中一个相位存在问题,导致我们的机械电枢出现共振摇晃。 是否有人知道这可能是什么原因? 我在所有原型主板上复制了类似的结果,这让我相信这是一个设计/配置问题。 我正在按以下方式配置驱动程序:0x0C41,0x1145,0x2030,0x31FF,0x4510, 0x6055 (我现在将停止设置为默认值)。
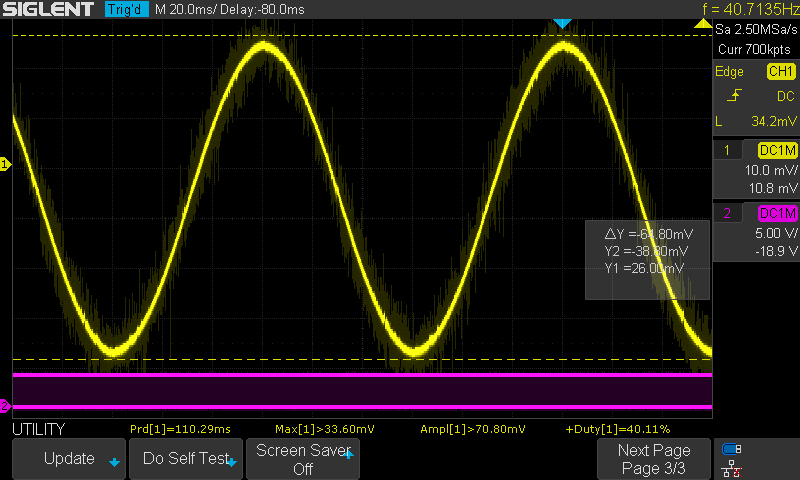
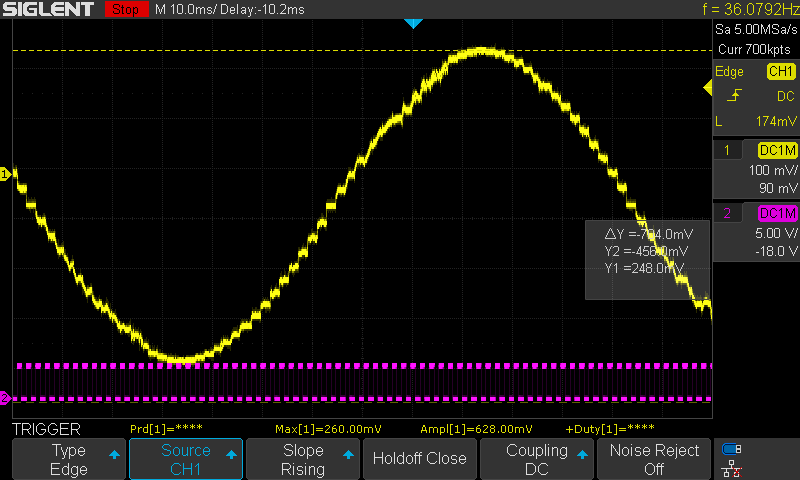
阶段A (不良):
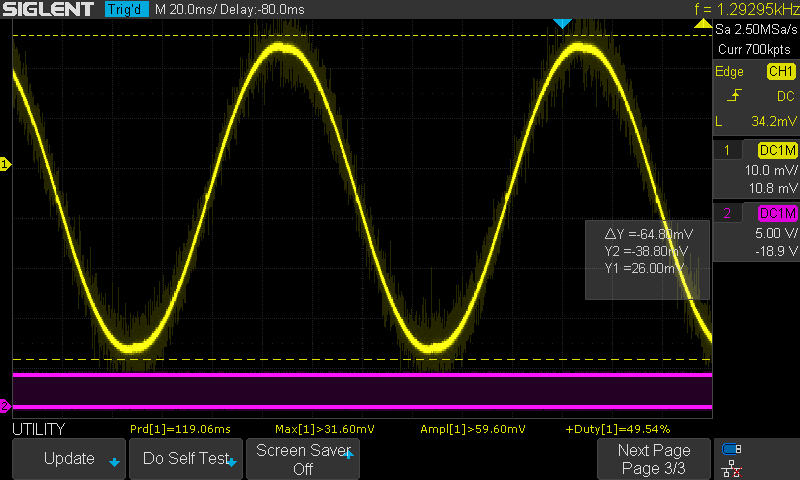
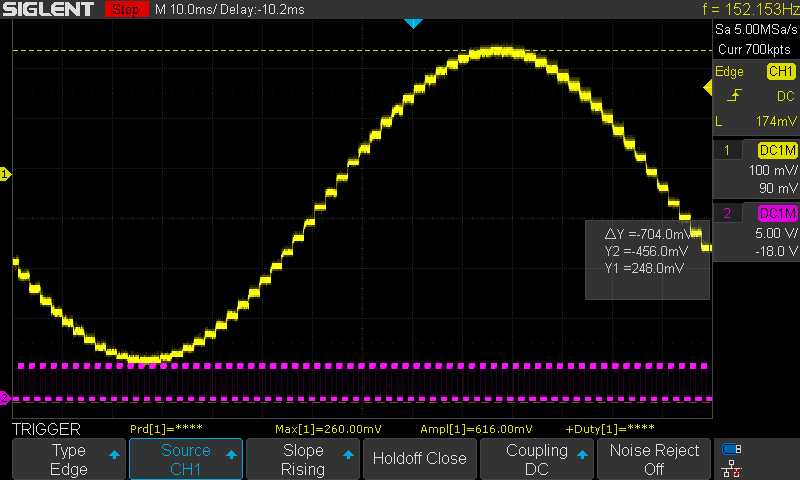
阶段B (正常):
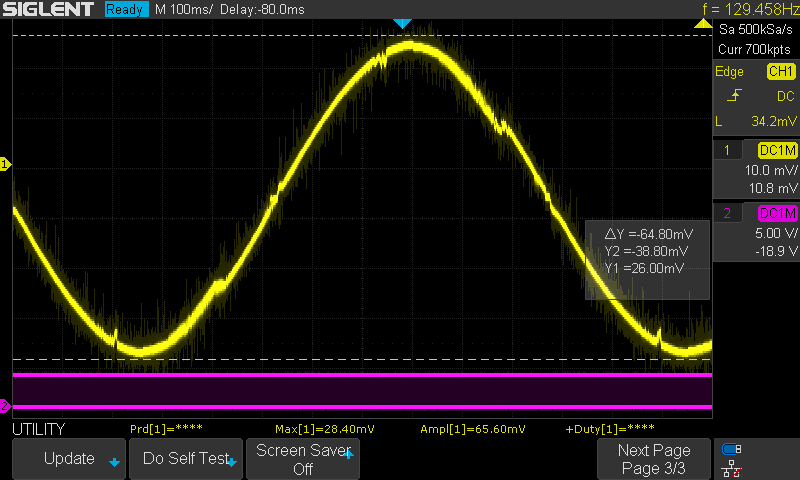
在更高的步分辨率下,该问题变得更加明显。 这是1/256,A相再次:

任何帮助/提示/猜测都将非常感谢。
谢谢!
Galen