请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
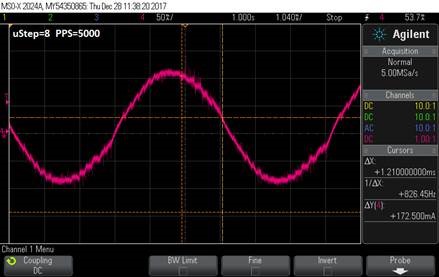
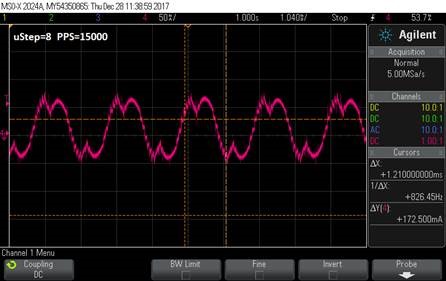
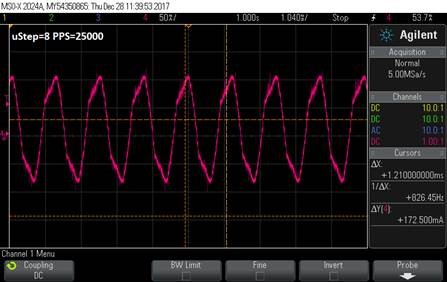
部件号:DRV8711 我们使用DRV8711-EVM驱动电动机,它具有相当的电感(200步/转,6.5mH,2.1 欧姆)。 为了精确度,我们需要使用64微步进,而为了速度,我们需要pps =100kHz。 我们的电源为28V,但我们可以使用48V电源。 我们将扭矩寄存器设置为通过电机获得1A。 当我们试图提高速度时,我们的当前波形会偏离 正弦曲线,变为三角形。 我们正在使用强制快速衰减模式。 将电源从28 V增加到48V会有所帮助,但并不能让我们达到所需的状态。 TBLANK = 1.5us,Toff = 5us,ISGAIN = 40。
对于我们如何改进事物,有什么见解?