请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8343S-Q1EVM 主题中讨论的其他器件:TMS320F280025C、 TMS320F280025、 C2000WARE-MOTORCONTROL-SDK、 DRV8323、 LAUNCHXL-F280025C、 INSTASPIN-BLDC、 BOOSTXL-DRV8323RS、 DAC128S085EVM
尊敬的 Aaron:
我们 将 drv8343与 msp430f5529c (非汽车) MCU 连接,采用梯形无传感器 BLDC 电机控制算法,在高达 9000 rpm 的钻机上成功进行了测试 。
现在,我们将尝试用 drv8343驱动程序 IC 替换 TMS320280023 (通过汽车认证) MCU 的 C2000系列,
最初尝试将 tms320f280025c Launchpad 套件与 DRV8343S EVB 板连接以使用电源模块。
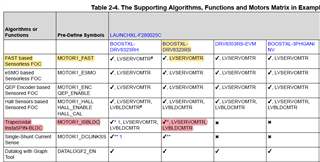
我已将 universal_motorcontrol_lab_f28002x 示例项目作为参考,尝试替换 DRV8343S 而不是 DRV8323S,这里的两 个驱动程序 IC 硬件抽象层完全不同。
请告诉我,这是最适合 使用 DRV8343S 驱动程序 IC 示例项目(软件的演示源代码)和用于新开发的硬件的 tms320f280025的方法。
请发送支持文档并提供反馈...
谢谢。
Bhuvanesh。




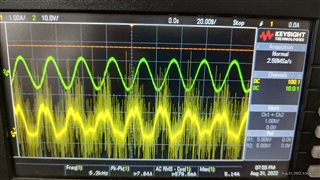
 已成功将 drv8343与 C2000 (f280025c MCU)连接
已成功将 drv8343与 C2000 (f280025c MCU)连接