请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UC2625 主题中讨论的其他器件: UC1625-SP、 DRV8343-Q1、 DRV8306
您好!
我正在尝试在电压模式下设置 UC2625。
我浏览过这个论坛并找到了这篇文章 https://e2e.ti.com/support/motor-drivers/f/38/p/612755/2382057?tisearch=e2e-sitesearch&keymatch=UC2625#2382057
与此图(来自本应用手册 :https://www.ti.com/lit/an/slua106/slua106.pdf)相关的部分、 可作为将芯片设置为电压模式的参考:
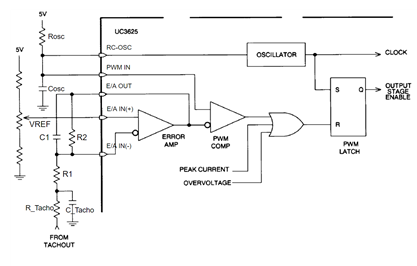
我想对如何为 C1、R1和 R2选择值进行一些说明。
(从谷歌上的一些挖掘中、它看起来是这样的、但我不确定)
顺便说一下、UCx625数据表中的参考设计说明似乎有错误。 该设计声称在电压模式下运行、但速度不会随电压变化而变化。 ( https://www.ti.com/lit/ds/symlink/uc2625.pdf?ts=1606093408447中的图15)
谢谢、
Daniel