请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:DRV8830、 DRV8210
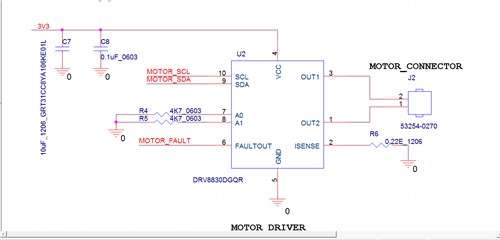
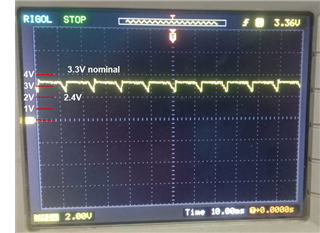
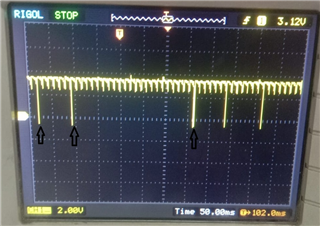
我们正在研究一个使用 DRV8830DGQR 电机的项目 控制器。 根据数据表、当电机进入失速状态时、FAULT 引脚会变为 低电平并保持低电平状态、直到出现故障情况。 实际上、在测试时、我们观察到它在故障时提供脉冲 引脚。 尽管电机处于失速状态、但它不会保持低电平状态。 此外、我们还会在获得之前获得噪声(低振幅脉冲) FAULT 引脚上的脉冲。 主机控制器很难感应 故障情况的原因。