

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-DRV8301 主题中讨论的其他器件: LAUNCHXL-F28027F、 DRV8301
大家好、
我正在尝试使用 Arduino Uno 和 BOOSTXL-DRV8301 板来控制12V 无传感器 BLDC (硬盘驱动器电机)。 由于无传感器 BLDC 控制需要6 PWM 模式、因此我在大约7.8KHz、30%的占空比下从 Arduino 发出6个软 PWM 信号。 为了控制 BLDC、我实现了6步切换。 每个阶跃每0.6ms 切换一次。 (下图显示了 Arduino 的6个 PWM 通道中的2个(PWM-AH、PWM-BH))

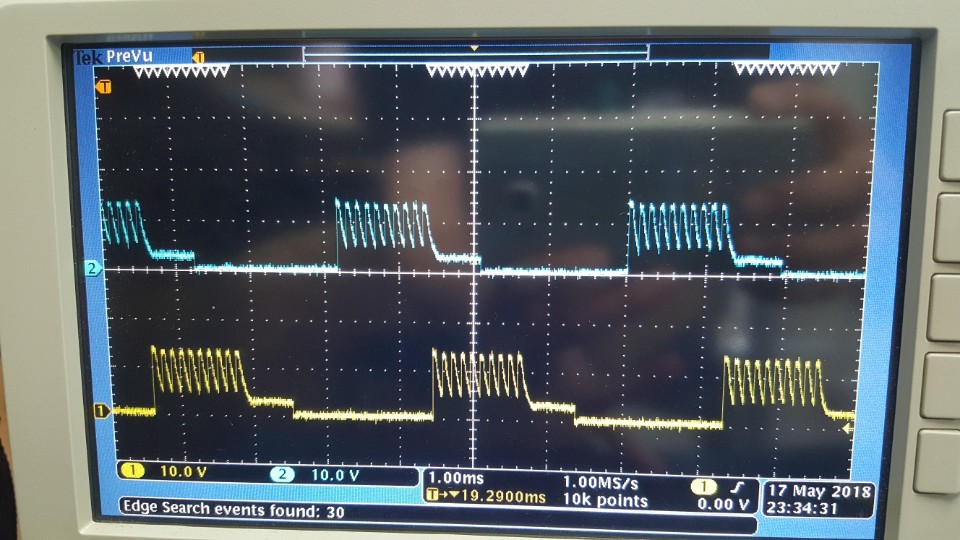
我将这6个 PWM 通道连接到 BOOSTXL-DRV8301板、但没有任何电平位移器、因为数据表中只显示输入引脚的最小高逻辑电平为2V。 我使用了 BOOSTXL-DRV8301的默认配置设置、因此2个板之间没有 SPI 连接。 BOOSTXL-DRV8301板的输出端没有任何负载、A 相和 B 相如下图所示
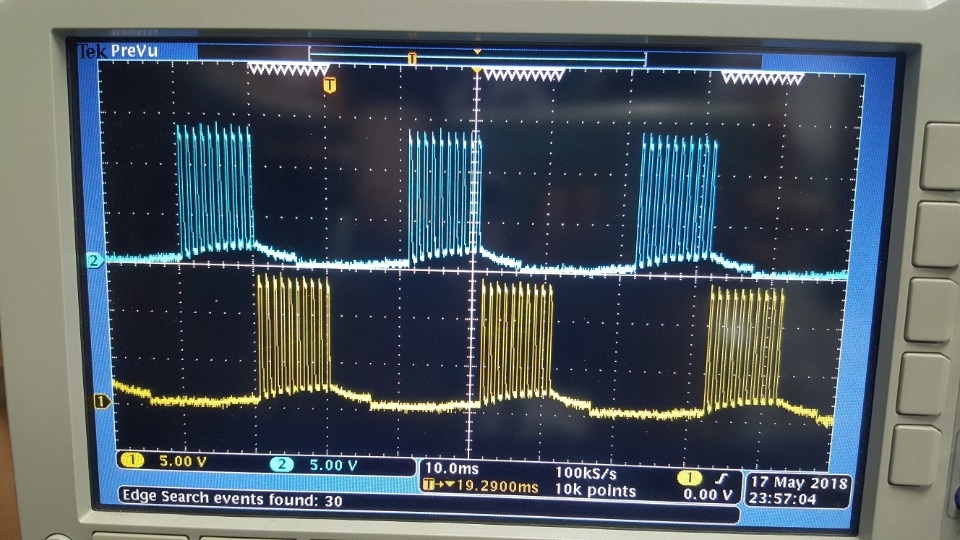
当我插入电机时、电机不工作、A 相和 B 相的相电压如下所示:

我尝试将 PWM 更改为0.98kHz、将步进开关时间更改为5.1ms
电机开始工作、但以低速旋转、很快发热。

有人能解释一下这个问题吗?
非常感谢您的参与。
