请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8350H-EVM 主题中讨论的其他器件:DRV8350S-EVM、 DRV8353R、 DRV8353
您好!
对于我们的电池供电型烟雾抽风扇、我们希望开发1.5KW 无刷电机驱动器。
对于新的开发、我们希望使用参考 DRV8350S。
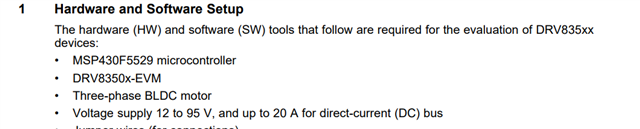
我们计划使用 DRV8350S-EVM 电路板开始我们的开发工作。
我的启动序列有问题、我们在电路板 DRV8350S-EVM 上使用 FIRware SLVC755无传感器。
电机在无负载的情况下正常运行。
对于负载(风扇的螺旋桨)、我无法使电机启动、我有过流错误。
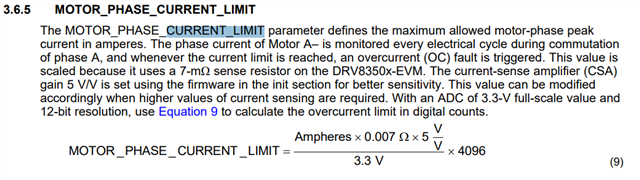
哪个参数有问题?
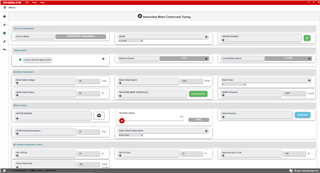
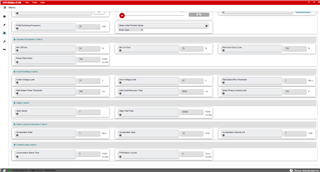
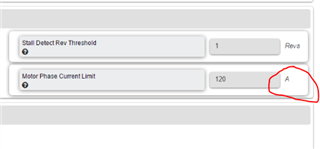
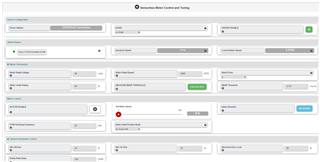
我的配置:
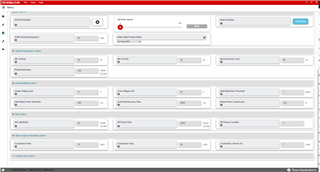
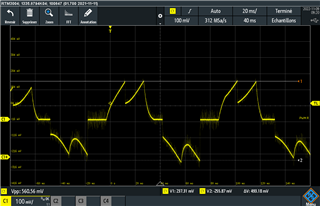
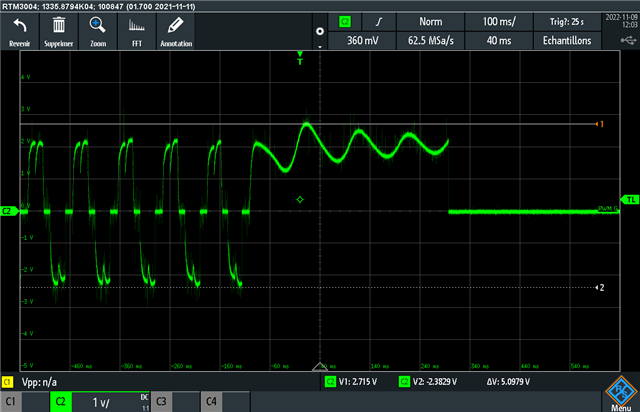
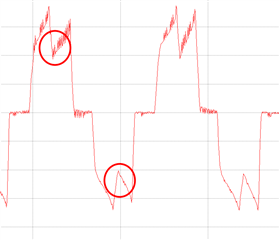
我的过流错误结果:
/cfs-file/__key/communityserver-discussions-components-files/38/20221020_5F00_165013.mp4
感谢。