请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8320 尊敬的 TI 支持团队:
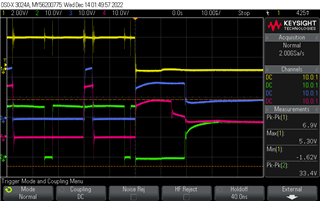
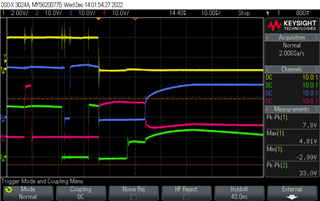
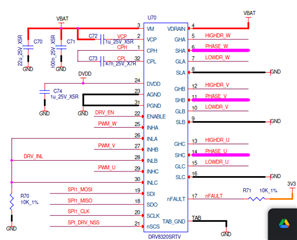
我们在3PWM 模式下使用 DRV8320来控制我们的无刷电机。 我们使用 INLx 引脚禁用单行中的所有 PWM 输出(原理图上的 DRV_INL 网络)。 在拉低所有3个 INLx 引脚时、我们观察到大负电流。
这是示波器行为。
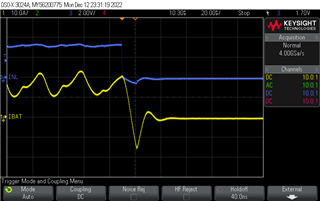
怎么可能? 我们是否可以更改任何内容以避免出现上面所示的任何负电流? 这对我们来说非常烦人
提前感谢