请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
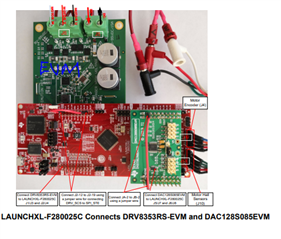
主题中讨论的其他器件:DRV8300、 LAUNCHXL-F280049C、 DRV8701、 DRV8353、DRV8353RS-EVM 、 LAUNCHXL-F280025C 相关您好!
需要开始一个 BLDC 电机控制产品开发,新项目。
这适用于适用于 2轮车应用的350W、48V 和60V BLDC 集线器电机。
电机具有霍尔传感器反馈。
我们可以使用简单的6步控制算法吗?
无急冲和无噪声性能尤其重要、尤其是在启动过程中。
请建议一个合适的 TI 解决方案...
此致、
Anil