

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8316Z 我正在使用 MCT8316Z、并尝试设置不同的工作模式、
在两种模式中、我看到不清楚的行为。
所有电机输出均设置为高电压(HS FET 全部打开),电机卡滞
要从卡滞状态释放、我只是将电机稍微移动一下到所需的方向、然后控制器开始工作、
我认为大多数时候它会卡住,当电机不能移动到一个方向(机械停止),但我确实要求它去另一个方向!!
-在这个特定的情况下,它得到100%的时间卡滞,但有时我看到它的发生没有机械限制的电机。
在任何情况下,我们都提供高 PWM (高达90%),而不是制动或滑行命令!
它会卡住的模式-
遇到困难时的合作模式-
Control_Registar_ 2A - PWM_MODE = 3 (与数字霍尔同步)
Control_Register_ 5 - EN_AAR=1、EN_ASR=1 (ASR 和 AAR 已启用)
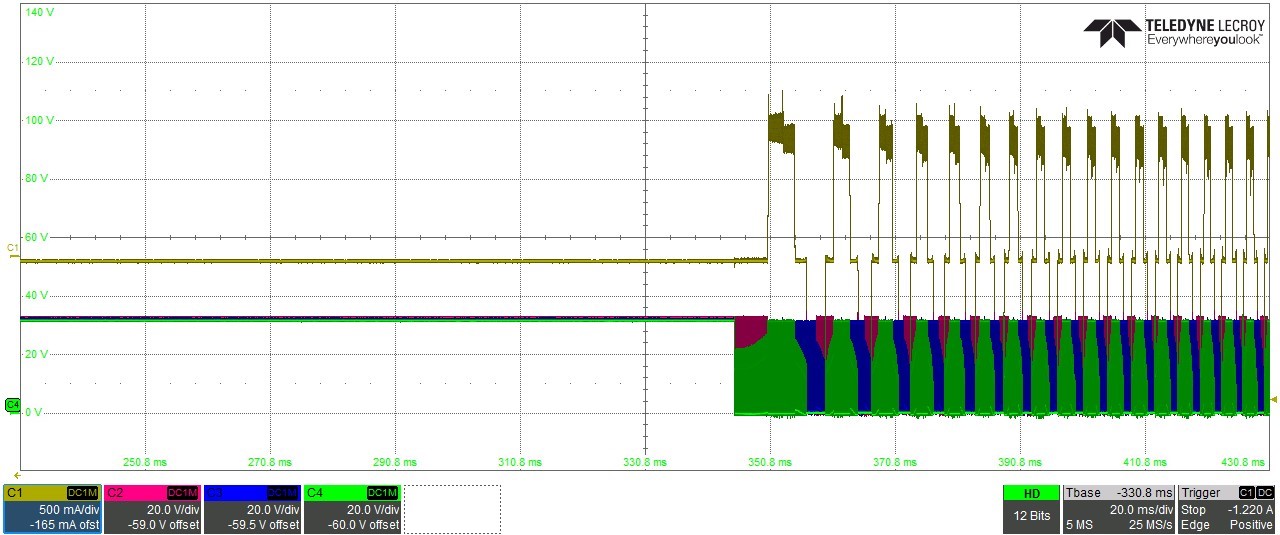
黄色-其中一个相电流
蓝色、红色、绿色-三相输出电压
可以看出、所有相位均为高压、这意味着所有相位 HS FET 均开路。
或
Control_Registar_ 2A - PWM_MODE = 1 (与数字霍尔异步)
Control_Register_ 5 - EN_AAR=1、EN_ASR=1 (ASR 和 AAR 已启用)
