Other Parts Discussed in Thread: MCF8315A
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8315EVM 主题中讨论的其他器件:MCF8315A
您好!
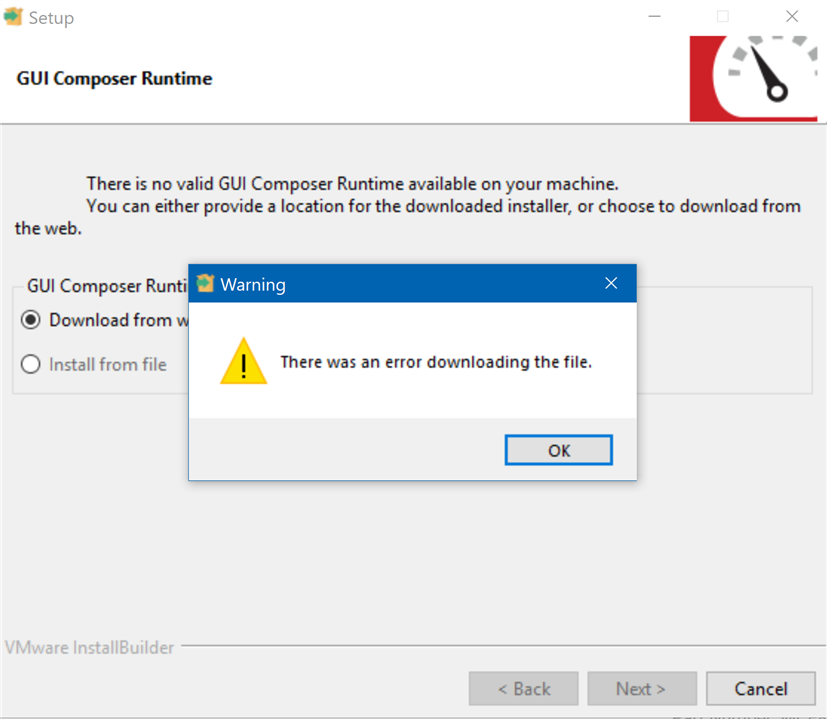
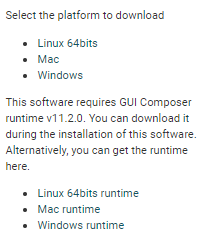
我无法使用 GUI 连接到此电路板。 我尝试过铬和火狐,但两种都不起作用。 我确实看到选项中提供了端口、并将波特率保留为9600。 我还尝试安装 Windows 版本的软件、但在安装 GUI Composer 时遇到问题。 它无法从 Web 安装、如果将其指向我已安装的 GUI Composer Runtime (6.2.0.1)、则无法找到有效的运行时。
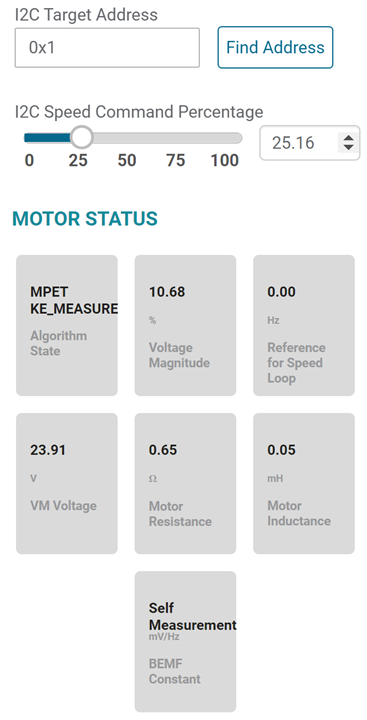
此外、我还无法按照调优指南/GUI 中的步骤使用 POT 速度选择来旋转电机。
我希望获得一些帮助、以使其正常工作。 谢谢!