请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8833C 主题中讨论的其他器件: DRV8833
您好!
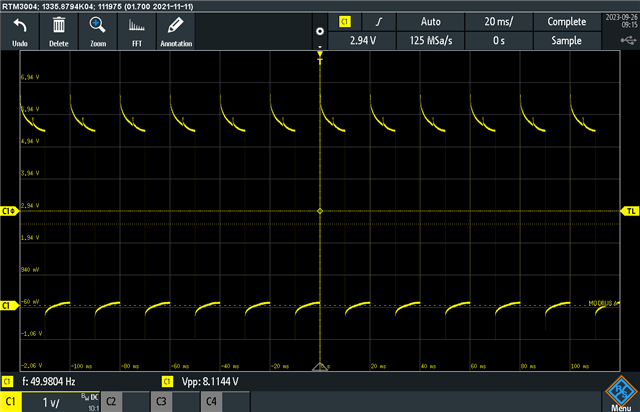
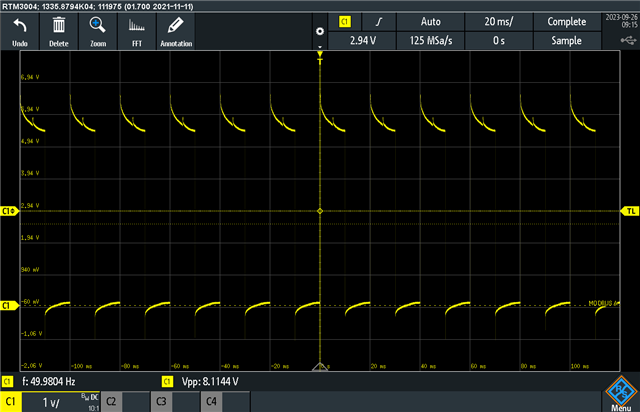
我使用 DRV8833C 驱动步进电机、(旋转频率为8Hz)驱动器处于全步进模式、一切似乎都正常(PWM 稳定并针对每个2输入进行偏移)图1是连接斩波器之前的 PWM。
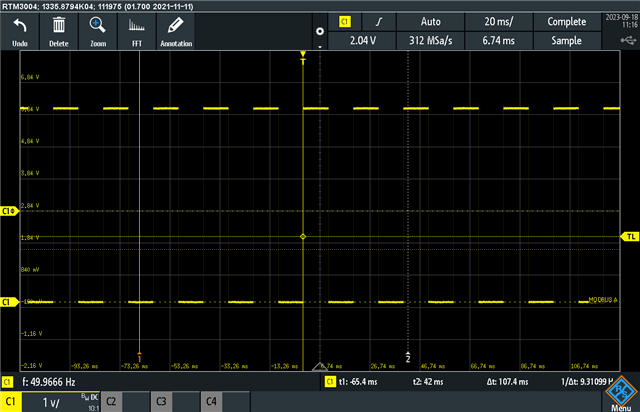
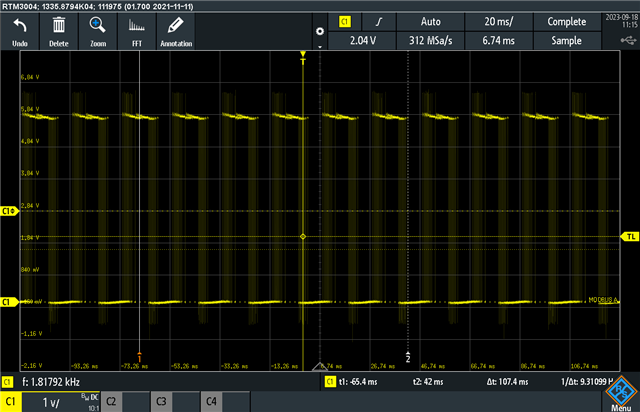
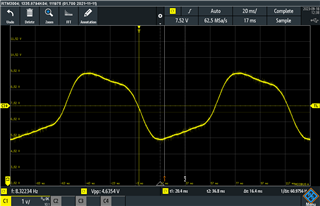
当我插入步进电机时、PWM 如图2 (拖拽)所示、这会在我在 DAQ 通道上测量的输出信号中产生噪声(图3)。
你知道这可能来自哪里吗?
图1。

图2
。 
图3.
期待您的反馈。
此致。